自动驾驶车辆语义分割
基于 U-Net 与 CARLA 自动驾驶仿真平台 的逐像素语义分割模块。源自伍斯特理工学院(WPI)研究生课程 RBE549 计算机视觉,团队选定"自动驾驶场景下的语义分割"作为期末研究:通过自动化脚本在 CARLA 仿真器中批量采集数千张带标注街景图像构建数据集,使用 Focal Loss + 类别权重 训练 U-Net 模型以缓解 CARLA 训练集中约 817:1 的极端类别不平衡,并对比不同输入尺寸/损失函数下的表现。
模块代码位于仓库的 src/auto_drive_seg/。
目录
项目简介
自动驾驶车辆需要从摄像头视频中实时理解周围环境:道路位置、人行道边界、前方车辆与行人——这些都是规划与控制的前置信息。语义分割(Semantic Segmentation) 把图像逐像素分到一个语义类别,是这一感知任务的标准解法。
本项目以 CARLA 作为数据源(自带"语义分割相机"传感器,省掉手工标注开销),实现了完整的"采集 → 训练 → 推理 → 评估"流水线。模块入口 main.py 提供六种使用模式,按扩展名/参数自动识别:
- 图片分割:单张图片 → 叠加图 + 纯掩码
- 视频分割:视频文件 → 逐帧分割叠加视频 + 采样帧拼图
- 数据增强可视化(
--augment):展示训练时使用的 6 种数据增强 - 推理延迟基准测试(
--benchmark):4 个预训练模型的 CPU 推理速度对比 - 类别概率热力图(
--heatmap):8 类 softmax 输出可视化,诊断模型偏置 - 类别频率分析(
--frequency):量化展示 CARLA 训练集类别不平衡与 Focal Loss 权重
安装步骤
环境要求
- 平台:Windows 10/11 或 Linux
- Python 3.10(TensorFlow 2.10 要求 Python 3.7–3.10)
- 纯 CPU 即可运行推理,无需 GPU
安装流程
- 克隆仓库:
git clone https://github.com/OpenHUTB/nn.git
cd nn/src/auto_drive_seg
- 创建 conda 环境并安装依赖:
conda create -n py310 python=3.10 -y
conda activate py310
pip install -r requirements.txt
国内网络可加清华镜像:pip install -r requirements.txt -i https://pypi.tuna.tsinghua.edu.cn/simple
- 获取预训练模型(模型为二进制大文件,未随仓库提交):
git clone https://github.com/hlfshell/rbe549-project-segmentation
将 rbe549-project-segmentation/models/unet_model_256x256_50 整个目录复制到本模块的 models/ 目录。原仓 models/ 下另有 unet_model_512x512_50、unet_model_512x512_focal_loss_with_weights 等更大输入尺寸的模型,可按需替换或全部下载用于多模型对比。
快速开始
main.py 是模块统一入口,按参数自动派发到不同模式。
图片输入
cd src/auto_drive_seg
python main.py # 默认示例图 + 默认 256x256 模型
python main.py examples/sample_input.png # 指定输入图
python main.py examples/sample_input.png models/unet_model_512x512_50
运行后在输入图同目录生成 *_overlay.png(分割叠加图)和 *_mask.png(纯掩码图)。
视频输入
python main.py path/to/video.mp4 # 自动识别 .mp4/.avi/.mov/.mkv/.webm
python main.py path/to/video.mp4 models/unet_model_256x256_50 120 # 限制 120 帧
输出 *_seg.mp4(逐帧分割叠加视频)和 *_seg_frames.png(采样帧拼图)。
数据增强可视化
python main.py --augment # 默认示例图
python main.py --augment examples/sample_input.png
输出 4 列拼图:原图 + 6 种增强(水平翻转、亮度+30%、对比度-30%、高斯模糊、椒盐噪声、中心裁剪)。
推理延迟基准测试
python main.py --benchmark # 自动加载 models/ 下所有预训练模型
每个模型 2 次预热 + 10 次正式推理,输出柱状图(含 mean ± min/max 误差棒)+ 控制台 markdown 表格。
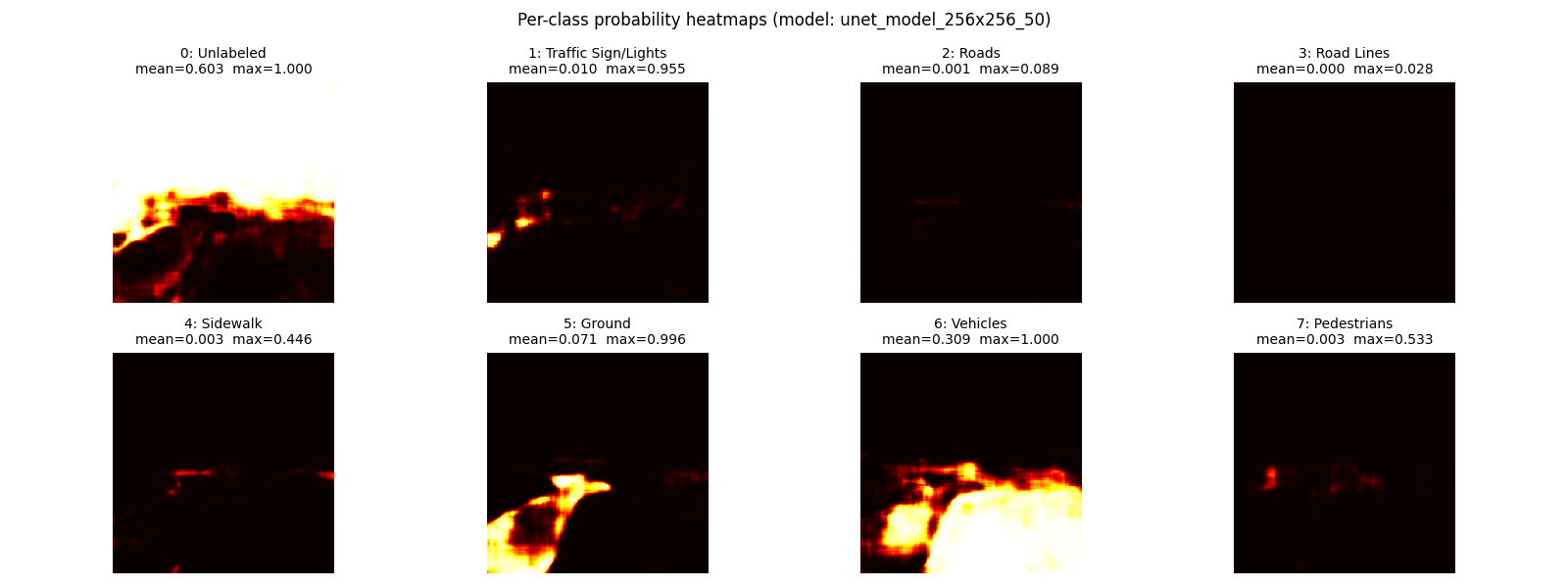
类别概率热力图
python main.py --heatmap # 默认 256x256 模型
python main.py --heatmap examples/sample_input.png models/unet_model_512x512_50
输出 4×2 网格:8 类的 softmax 概率灰度热力图,每张面板标该类的均值/最大值。
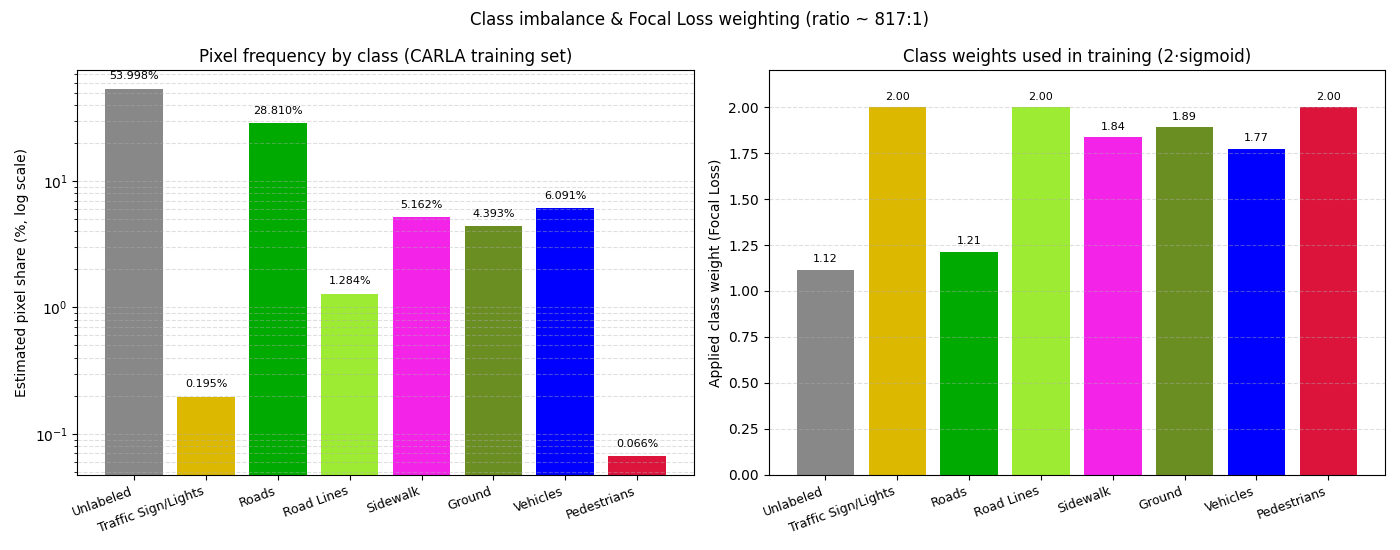
类别频率分析
python main.py --frequency # 不需要模型或输入图
控制台输出 markdown 表格 + 极端比例(约 817:1),同时生成两栏柱状图(左:log 纵轴像素占比;右:训练实际使用的 Focal Loss 权重)。
运行效果
单张图片:分割叠加 + 纯掩码
输入 CARLA 街景图,模型输出每像素类别预测,叠加在原图上(蓝=车辆、绿=道路/地面、红=行人、黄=交通标志):
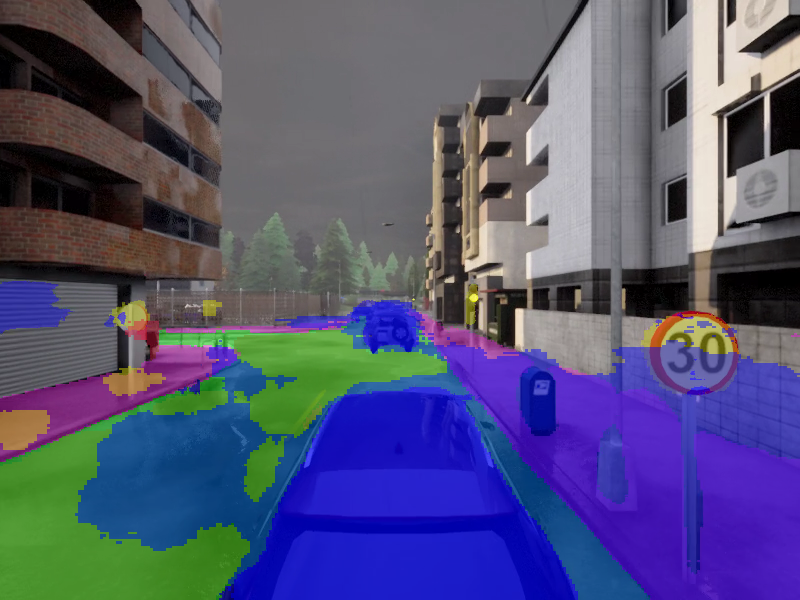
仅显示分割结果(纯掩码):

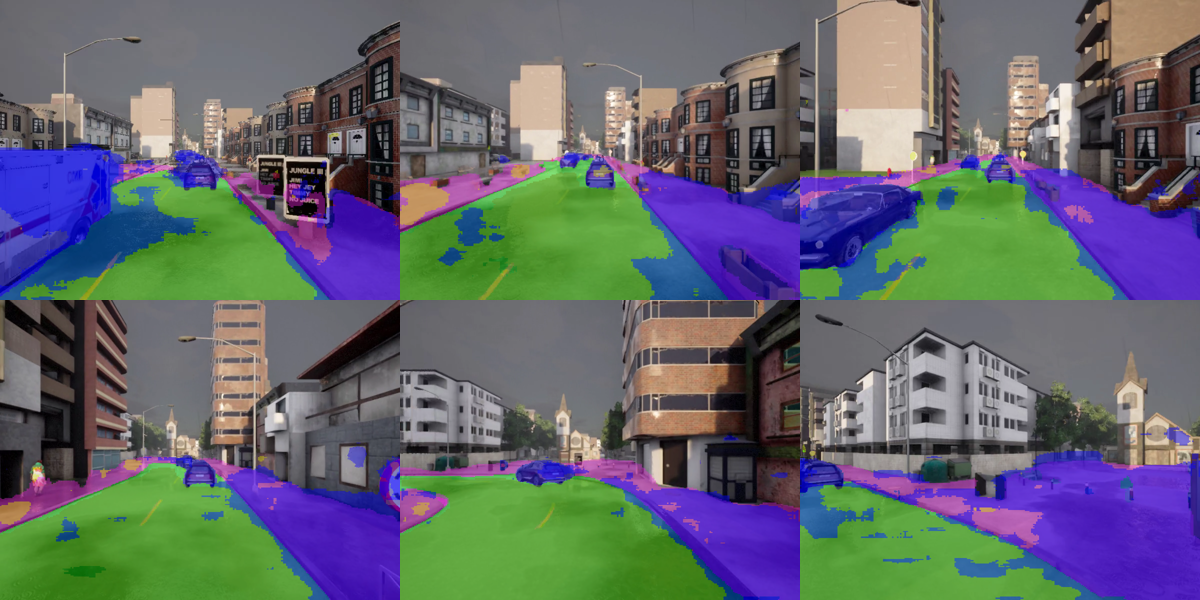
视频逐帧分割
视频中 6 个均匀采样帧的分割结果(叠加视频本身约 4MB,不入仓):
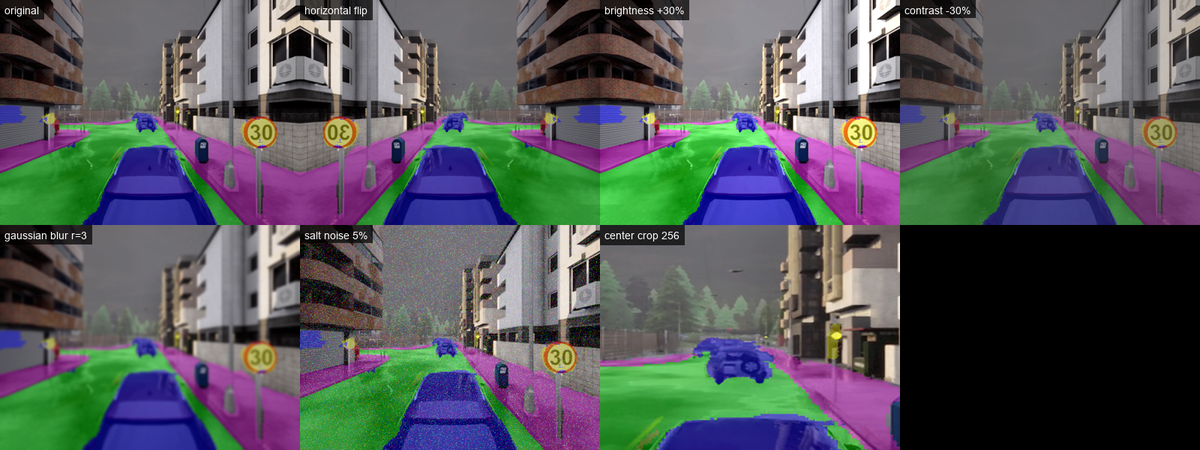
数据增强可视化
dataset.py 训练时随机施加 6 种增强缓解过拟合,下图为它们独立施加在同一张图上的效果:
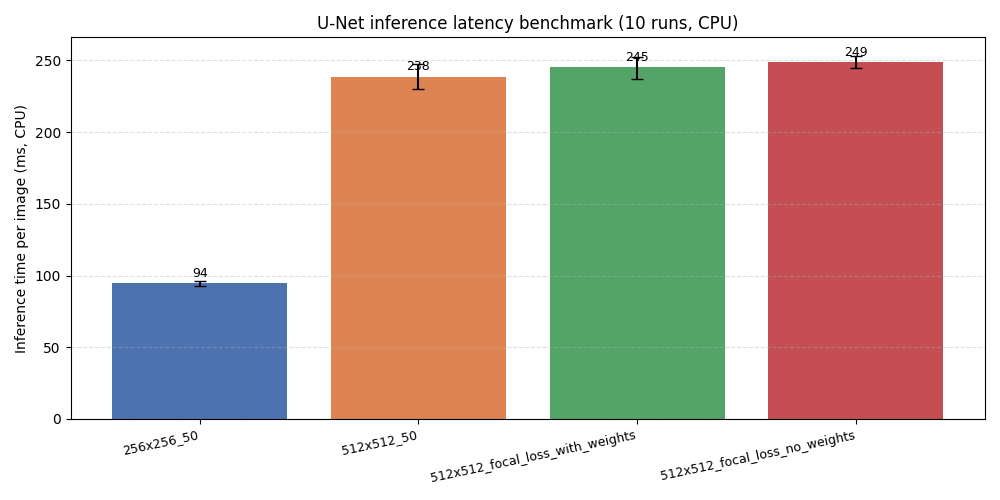
多模型 CPU 推理延迟
256x256 输入比 512x512 在 CPU 上快约 2.6 倍;512x512 的三个变体(基础、focal+权重、focal 无权重)速度几乎一致——计算量相同,差异仅在训练目标:
类别概率热力图(模型偏置诊断)
亮 = 模型认为该位置更可能属于该类。256x256 模型对 Vehicles/Ground 高度自信(max≈1.0),但对 Roads(max≈0.09)和 Road Lines(max≈0.03)几乎检测不到,Pedestrians 最高置信度仅约 0.5——直接体现了类别不平衡对少数类的伤害:
类别不平衡与 Focal Loss 权重
CARLA 训练集 8 类极度不平衡(最多 Unlabeled 占 54%,最少 Pedestrians 仅 0.066%,比例 817:1)。Focal Loss 用 2·sigmoid(像素比例) 把此跨度压成 1.12-2.00 的温和加权(少数类 ≈2.0、多数类 ≈1.1),让模型在每张图的梯度中也能感知少数类:
核心技术
网络结构:U-Net
经典 U-Net 编码-解码结构(src/auto_drive_seg/semantic/unet/model.py):
- 下采样路径:3 个残差块,特征通道 64 → 128 → 256,每块 SeparableConv2D + BatchNorm + ReLU + MaxPool 缩小特征图
- 上采样路径:对应 4 个上采样块,Conv2DTranspose + UpSampling 还原空间分辨率,残差连接保留细节
- 输出层:1×1 卷积 + softmax,逐像素输出 8 类概率
损失函数:Sparse Categorical Focal Loss + 类别权重
为解决类别不平衡,采用 Focal Loss 替代普通交叉熵:
其中 项压低"容易分对"样本(多数类的道路像素)的权重,让模型聚焦"难分对"样本(少数类的行人、交通标志)。本项目设 ,并额外为每个类别赋予基于像素频率倒数的权重(用 2·sigmoid 压缩到 0-2 区间),详见 semantic/unet/train.py 中的 CLASS_PIXEL_RATIOS。
数据增强
训练时对每张图随机施加 6 种增强(semantic/unet/dataset.py):水平翻转、亮度 ±40%、对比度 -40%、高斯模糊半径 0–5、椒盐噪声 0–7%、以及"中心区域裁剪缩放"(针对小目标识别)。可用 python main.py --augment 单独可视化每种增强的效果。
类别定义与配色
本项目将 CARLA 默认的 23 类语义标签归并为 8 类,便于自动驾驶决策使用:
| ID | 类别 | 颜色 (R, G, B) | 估计像素占比 | Focal Loss 权重 |
|---|---|---|---|---|
| 0 | 未标注 (Unlabeled) | (0, 0, 0) | 53.998% | 1.115 |
| 1 | 交通标志/灯 (Traffic Sign/Lights) | (220, 220, 0) | 0.195% | 2.000 |
| 2 | 道路 (Roads) | (0, 255, 0) | 28.810% | 1.214 |
| 3 | 车道线 (Road Lines) | (157, 234, 50) | 1.284% | 2.000 |
| 4 | 人行道 (Sidewalk) | (244, 35, 232) | 5.162% | 1.837 |
| 5 | 地面 (Ground) | (107, 142, 35) | 4.393% | 1.890 |
| 6 | 车辆 (Vehicles) | (0, 0, 255) | 6.091% | 1.772 |
| 7 | 行人 (Pedestrians) | (220, 20, 60) | 0.066% | 2.000 |
完整 CARLA → 本项目类别映射见 semantic/carla_controller/labels.py。
项目结构
src/auto_drive_seg/
main.py 推理入口(按 OpenHUTB 规范以 main. 开头,统一派发 6 种模式)
requirements.txt 依赖清单
semantic/ 推理与训练核心代码
unet/
model.py U-Net 编码-解码结构
dataset.py CARLA 数据生成器 + 数据增强
train.py 训练循环 + Focal Loss + CLASS_PIXEL_RATIOS 常量
utils.py 推理、可视化、掩码上色
carla_controller/
labels.py CARLA → 8 类语义类别映射与配色
examples/ 示例输入图与运行效果图
models/ 预训练模型(需自行获取,见安装步骤)
说明:原始项目中
semantic/carla_controller/还含有 CARLA 数据采集脚本(依赖carla包与运行中的仿真器),与推理无关,本模块未收录。训练数据集需通过 CARLA 仿真器实跑采集,详见原始项目。
参考资料
- 原始项目:hlfshell/rbe549-project-segmentation
- U-Net 论文:Ronneberger O. et al., U-Net: Convolutional Networks for Biomedical Image Segmentation, MICCAI 2015
- Focal Loss 论文:Lin T. et al., Focal Loss for Dense Object Detection, ICCV 2017
- CARLA 模拟器:https://carla.org/
- CARLA 语义分割相机:https://carla.readthedocs.io/en/latest/ref_sensors/#semantic-segmentation-camera