车道线检测(lane_detection)
基于 OpenCV 的 Carla 场景车道线检测模块,分步完成预处理、边缘检测、霍夫直线检测与 HSV 多车道拟合。
作者:ultra223
课题进度:8/10(步骤1 基础检测 + 步骤2 HSV 优化 + 步骤3 透视变换+多项式拟合 + 步骤4 视频处理 + 步骤5 曲率与偏移计算 + 步骤6 车道偏离预警 + 步骤7 快速搜索优化 + 步骤8 预处理对比评估)
课题进度:7/10(步骤1 基础检测 + 步骤2 HSV 优化 + 步骤3 透视变换+多项式拟合 + 步骤4 视频处理 + 步骤5 曲率与偏移计算 + 步骤6 车道偏离预警 + 步骤7 快速搜索优化)
课题进度:6/10(步骤1 基础检测 + 步骤2 HSV 优化 + 步骤3 透视变换+多项式拟合 + 步骤4 视频处理 + 步骤5 曲率与偏移计算 + 步骤6 车道偏离预警)
课题进度:5/10(步骤1 基础检测 + 步骤2 HSV 优化 + 步骤3 透视变换+多项式拟合 + 步骤4 视频处理 + 步骤5 曲率与偏移计算)
课题进度:4/10(步骤1 基础检测 + 步骤2 HSV 优化 + 步骤3 透视变换+多项式拟合 + 步骤4 视频处理)
课题进度:3/10(步骤1 基础检测 + 步骤2 HSV 优化 + 步骤3 透视变换+多项式拟合)
课题进度:2/10(步骤1 基础检测 + 步骤2 HSV 优化)
模块结构
| 文件 | 说明 |
|---|---|
main.py |
唯一入口,运行整个模块 |
config.py |
路径与算法参数 |
lane_preprocess.py |
步骤1:灰度、Canny、ROI、霍夫 |
lane_detect.py |
步骤2:HSV 黄白线、双黄线中心轴、左右车道 |
lane_advanced.py |
步骤3 & 5:透视变换、滑动窗口、多项式拟合、曲率与偏移计算 |
lane_video.py |
步骤4 & 7:视频处理、帧间 EMA 平滑、快速搜索 |
lane_warning.py |
步骤6:车道偏离预警、三级风险判定 |
lane_compare.py |
步骤8:预处理对比评估、定量指标 |
lane_advanced.py |
步骤3:透视变换、滑动窗口、二次多项式拟合 |
lane_video.py |
步骤4:视频处理、帧间 EMA 平滑 |
lane_warning.py |
步骤6:车道偏离预警、三级风险判定 |
carla_test.jpg |
少量示例输入(运行依赖) |
开发环境
- Python 3.8+
- OpenCV-Python、NumPy
pip install opencv-python numpy -i https://pypi.tuna.tsinghua.edu.cn/simple
运行方式
在仓库根目录或模块目录下执行:
cd src/lane_detection
python main.py
# 步骤2:HSV 多车道检测
python main.py --mode hsv
# 步骤3:透视变换 + 滑动窗口 + 多项式拟合
python main.py --mode advanced
# 步骤4:视频模式(逐帧检测 + EMA 平滑)
python main.py --mode video --video path/to/video.mp4
# 重新生成文档配图(写入 docs/lane_detection/images)
python main.py --save-docs --no-show
python main.py --mode hsv --save-docs --no-show
python main.py --mode advanced --save-docs --no-show
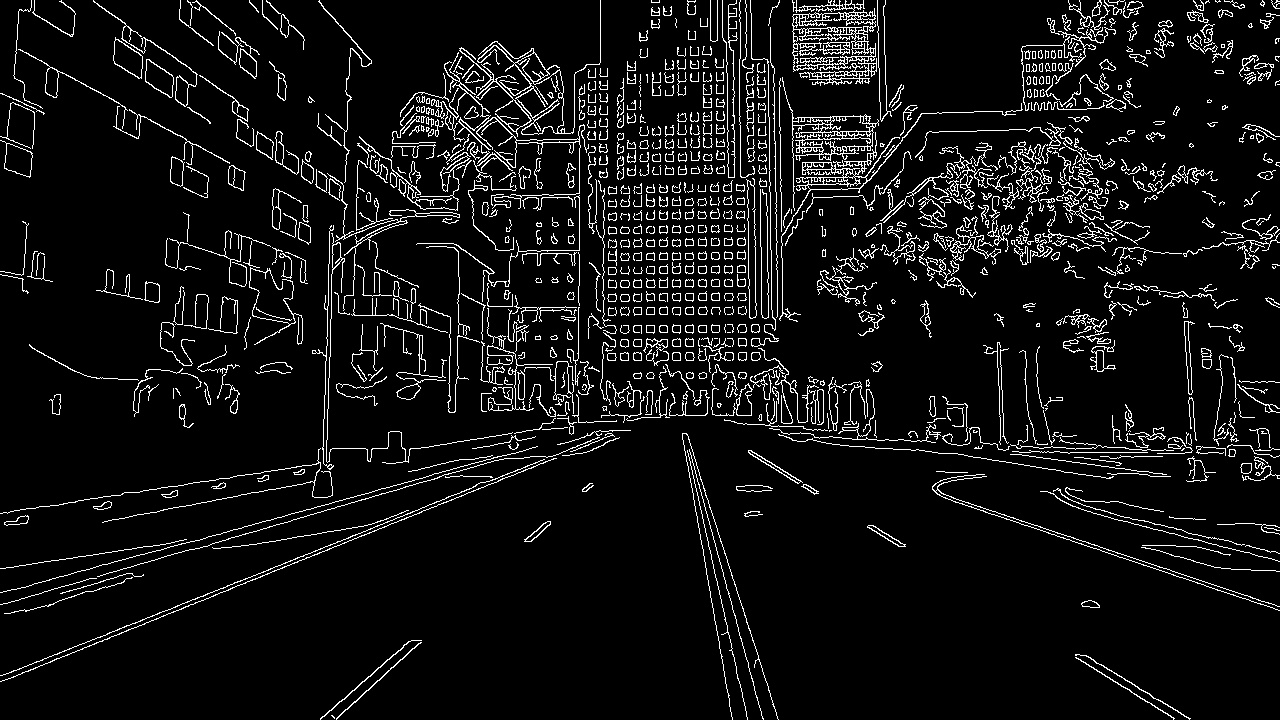
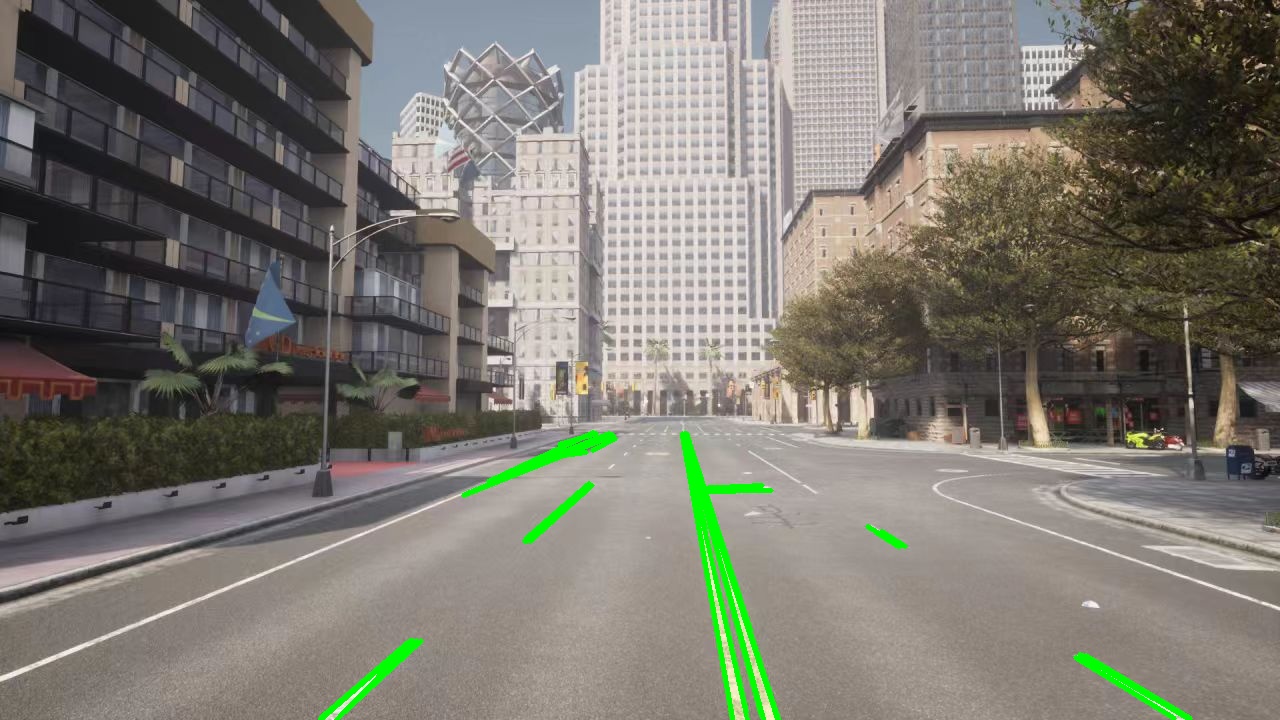
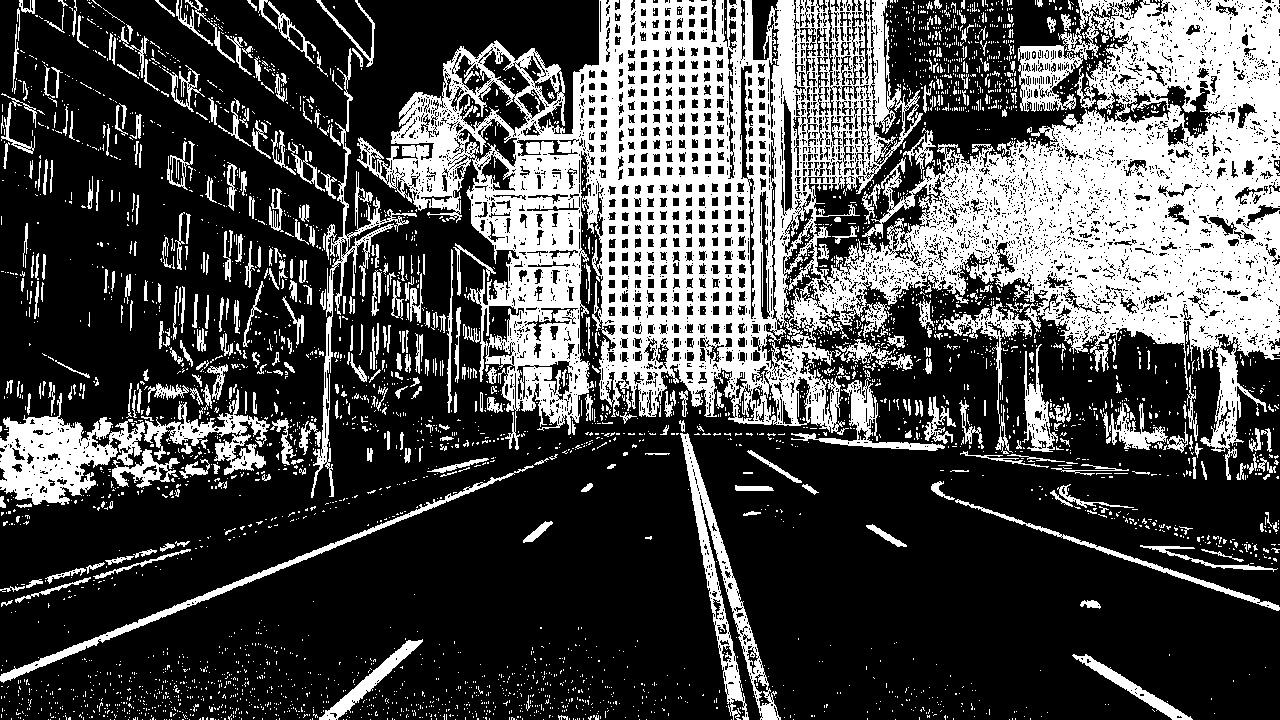
步骤1:基础版(Canny + 霍夫)
对 Carla 测试图做灰度化、高斯模糊、Canny 边缘检测、梯形 ROI 裁剪,再用霍夫变换检测车道线段。
输入原图

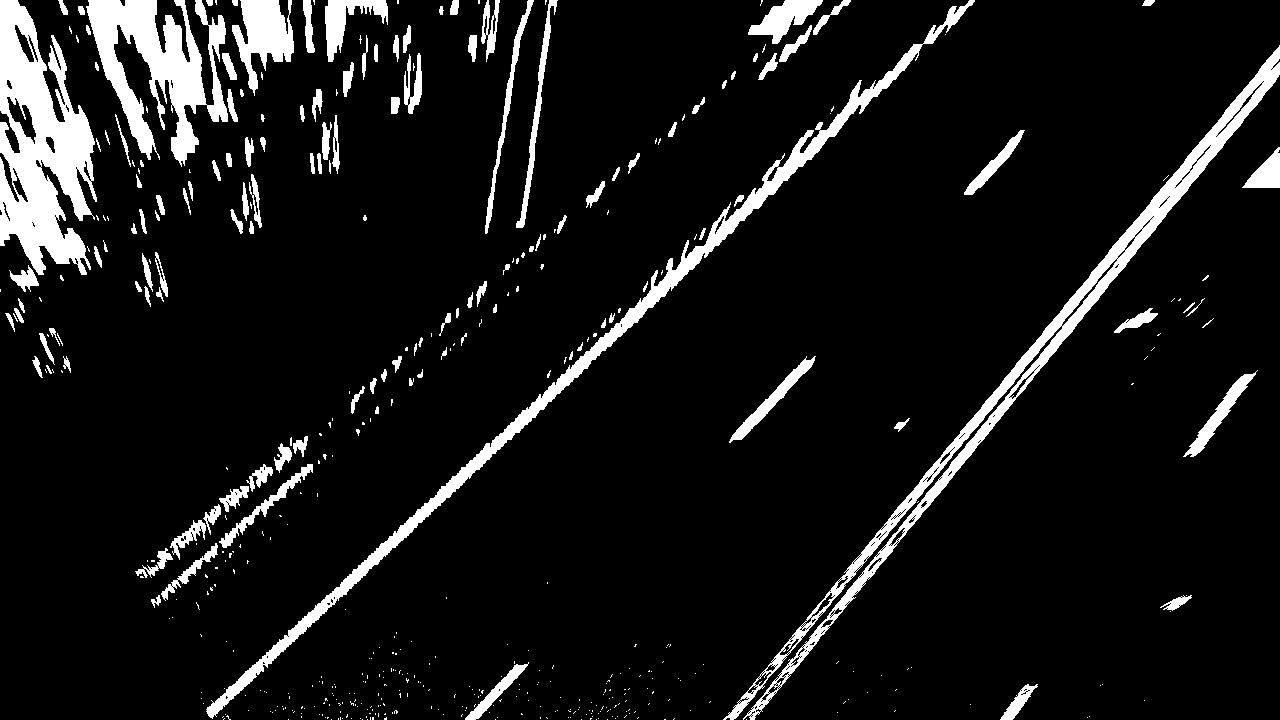
Canny 边缘
ROI 区域
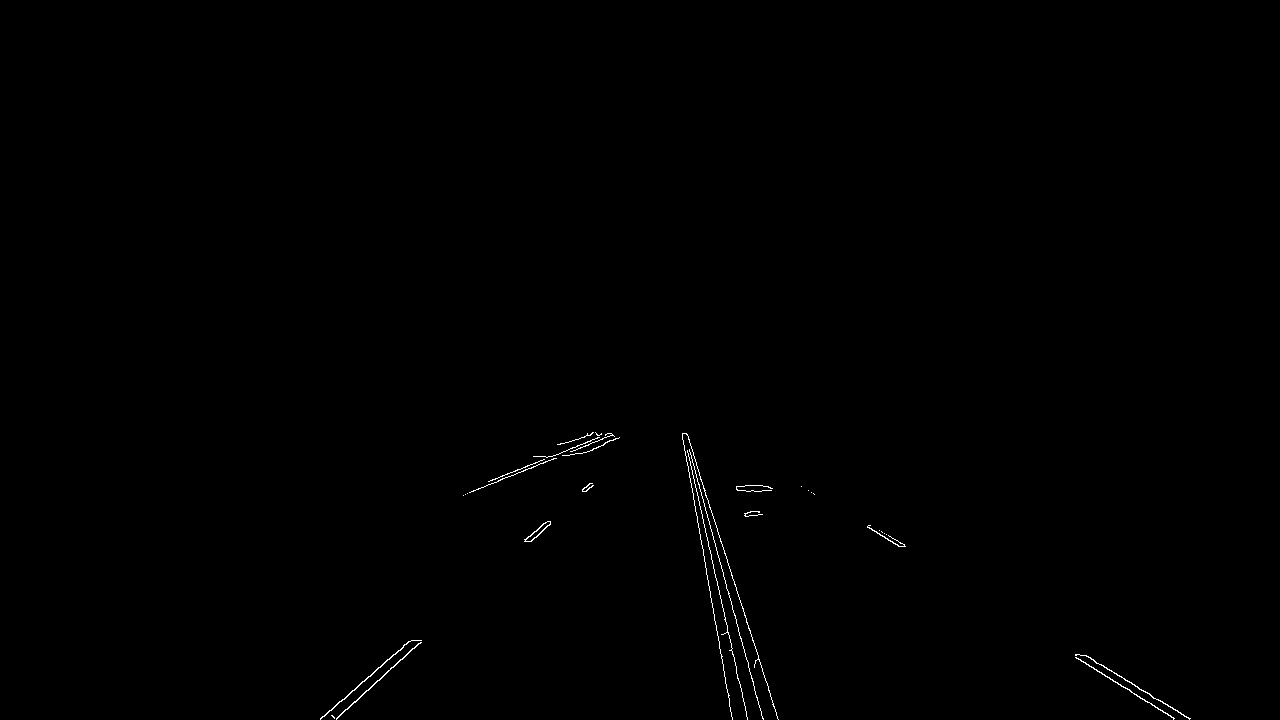
霍夫直线叠加结果
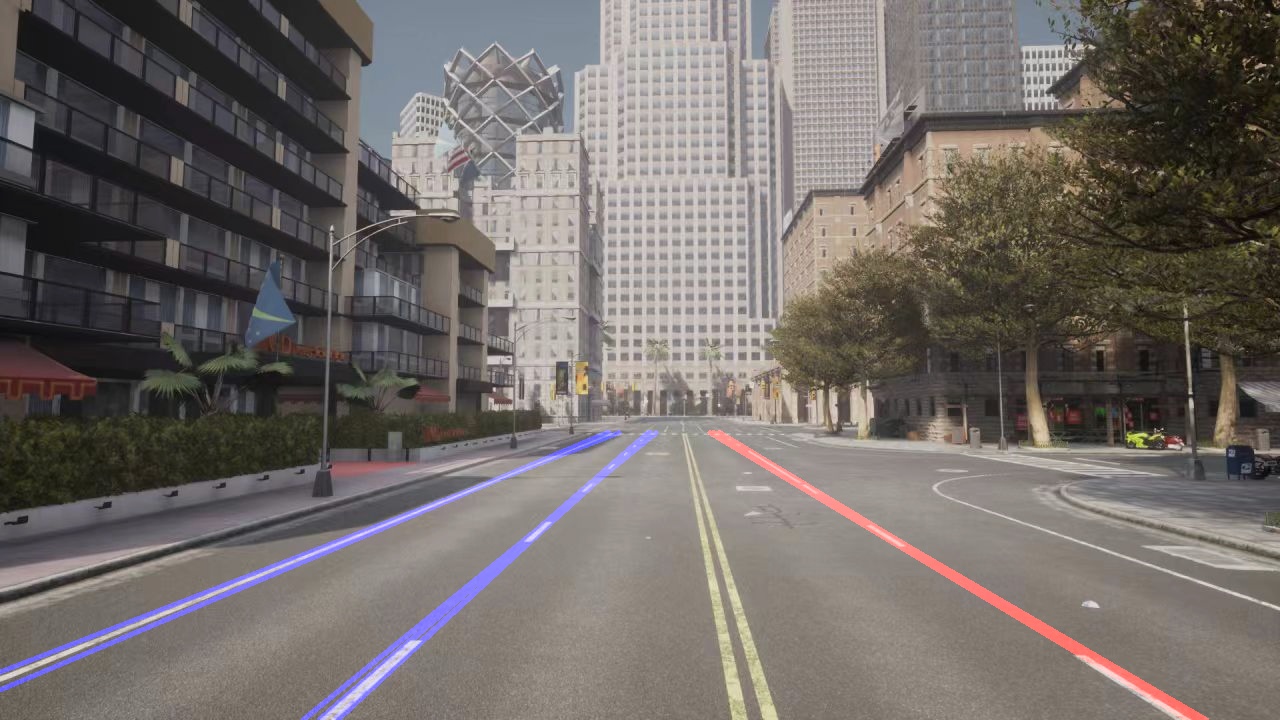
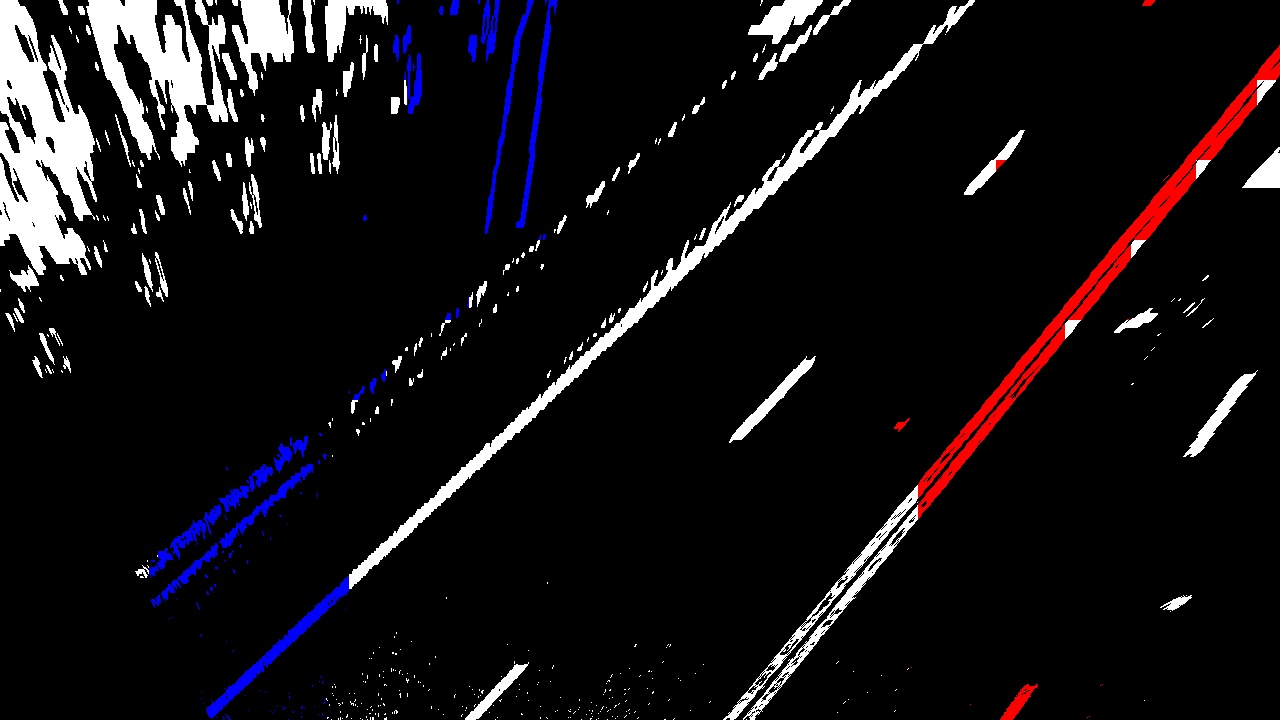
步骤2:HSV 预处理优化
在 HSV 空间分别提取黄色(双黄线)与白色(车道线)掩膜,以双黄线为界划分左右车道并拟合绘制。
输入原图

黄色车道线掩膜

白色车道线掩膜
多车道拟合结果
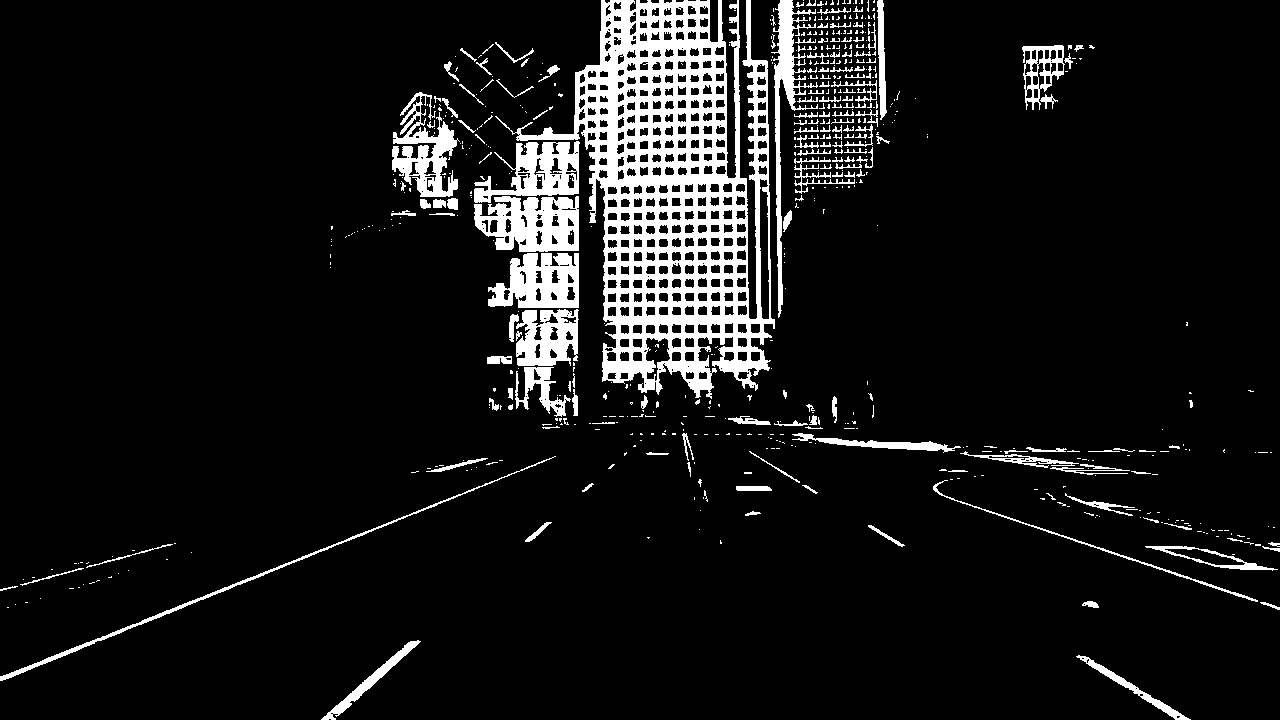
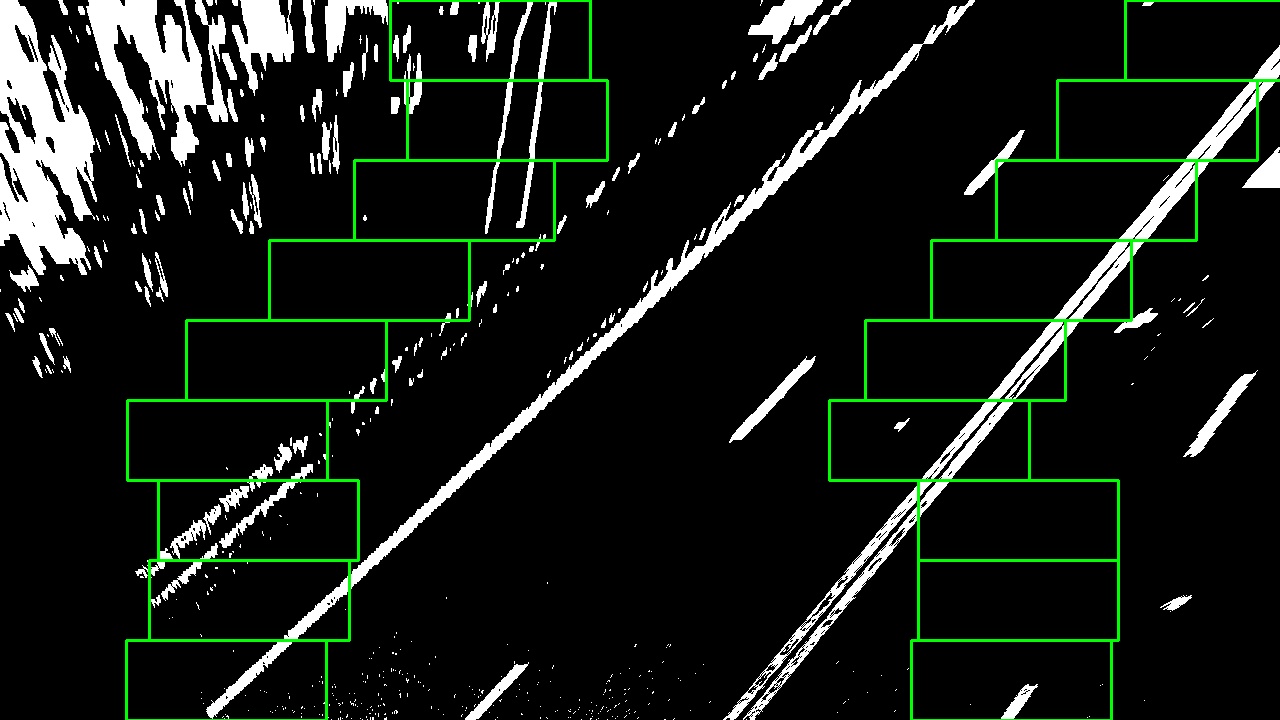
步骤3:透视变换 + 滑动窗口 + 多项式拟合
在 HSV + Sobel 梯度联合二值化的基础上,通过透视变换获取鸟瞰图,利用直方图定位车道线基点,滑动窗口搜索车道像素,最后使用二次多项式拟合弯道曲线并反透视叠加回原图。
HSV + Sobel 二值化车道线
鸟瞰图透视变换
滑动窗口搜索
二次多项式拟合结果
最终检测结果

步骤4:视频处理与帧间平滑
在步骤3的基础上,支持视频文件输入,逐帧执行高级车道线检测流水线,并对连续帧的多项式拟合系数做指数移动平均(EMA)平滑,消除相邻帧之间的抖动,输出稳定的车道线跟踪结果。
关键参数
| 参数 | 默认值 | 说明 |
|---|---|---|
--alpha |
0.3 | EMA 平滑系数(0~1),越小越平滑 |
--video |
— | 输入视频路径 |
--save-docs |
— | 保存输出视频到文档目录 |
EMA 平滑公式
fit_smoothed = α × fit_current + (1 − α) × fit_previous
- α = 1.0:完全使用当前帧结果(无平滑,可能抖动)
- α = 0.1:高度平滑,响应慢但稳定
- α = 0.3(默认):兼顾响应速度和平滑度
步骤5:车道曲率与车辆偏移计算
在步骤3/4的基础上,利用二次多项式拟合系数计算车道曲率半径与车辆相对车道中心的横向偏移,并在结果图上叠加实时信息,帮助评估驾驶状态。
关键参数
| 参数 | 默认值 | 说明 |
|---|---|---|
--no-metrics |
否 | 隐藏曲率与偏移信息 |
ym_per_pix |
30/720 | 纵向像素→米转换因子 |
xm_per_pix |
3.7/700 | 横向像素→米转换因子 |
曲率半径公式
车道线模型: x = A·y² + B·y + C
曲率半径: R = (1 + (2Ay + B)²)^(3/2) / |2A|
- 像素坐标系数先转换为真实世界(米)坐标再计算
- 曲率半径 > 800 m 视为直道
- 颜色编码:绿色=安全,黄色=弯道,红色=偏移过大
叠加信息
| 信息 | 说明 |
|---|---|
| 曲率半径 | 左右车道线平均曲率半径(米) |
| 车道方向 | 直行 / 左弯 / 右弯 |
| 车辆偏移 | 车辆相对车道中心的横向偏移(米) |
| 偏移方向 | 居中 / 偏左 / 偏右 |
| 左右线曲率 | 各车道线独立的曲率半径 |
使用方式
# 图片模式(自动显示曲率与偏移)
python main.py --mode advanced
# 视频模式(每帧显示曲率与偏移)
python main.py --mode video --video path/to/video.mp4
# 隐藏曲率信息
python main.py --mode advanced --no-metrics
python main.py --mode video --video path/to/video.mp4 --no-metrics
步骤6:车道偏离预警系统
基于曲率半径和车辆偏移量,实时判定三级驾驶风险,并通过车道区域颜色变化和信息面板给出视觉预警。
三级预警
| 等级 | 颜色 | 触发条件 |
|---|---|---|
| 安全 | 绿色 | 偏移 < 0.15m 且曲率半径 > 500m 且双侧车道线正常 |
| 注意 | 黄色 | 偏移 0.15~0.40m 或 曲率半径 200~500m |
| 危险 | 红色 | 偏移 > 0.40m 或 曲率半径 < 200m 或 车道线丢失 |
视觉反馈
- 车道区域填充色随预警级别变化(绿/黄/红)
- 左上角信息面板第一条显示
STATUS: 安全/注意/危险 - 仪表盘风格:彩色背景条 + 白色标签文字
关键参数
| 参数 | 默认值 | 说明 |
|---|---|---|
--no-warning |
否 | 隐藏预警信息(车道区域恢复默认绿色) |
warning_offset_caution |
0.15m | 偏移超过此值触发注意 |
warning_offset_danger |
0.40m | 偏移超过此值触发危险 |
warning_curve_caution |
500m | 曲率低于此值触发注意 |
warning_curve_danger |
200m | 曲率低于此值触发危险 |
使用方式
# 图片模式(自动显示预警状态)
python main.py --mode advanced
# 视频模式(每帧实时显示预警)
python main.py --mode video --video path/to/video.mp4
# 隐藏预警信息
python main.py --mode advanced --no-warning
python main.py --mode video --video path/to/video.mp4 --no-warning
步骤7:快速搜索优化(视频模式)
视频模式下,首帧使用滑动窗口搜索,后续帧在上一帧多项式曲线 ±margin 范围内搜索车道像素(带搜索),大幅减少计算量。检测丢失时自动回退到滑动窗口。
搜索策略
| 帧 | 搜索方式 | 说明 |
|---|---|---|
| 第 1 帧 | 滑动窗口 | 从直方图定位基点,9 个窗口逐层搜索 |
| 第 2+ 帧 | 带搜索(band search) | 在上一帧曲线 ±50px 范围内搜索像素 |
| 搜索失败 | 回退滑动窗口 | 有效像素 < 30 时触发回退 |
| 连续回退 ≥ 5 次 | 重新校准 | 强制用滑动窗口搜索,重新定位 |
视觉指示
- 视频左下角显示搜索模式:
BAND (fast)(绿色)/SW (init)(黄色)/SW (fallback xN)(黄色) - 处理完成后输出统计:带搜索次数、滑动窗口次数、回退次数
使用方式
# 默认启用快速搜索
python main.py --mode video --video path/to/video.mp4
# 关闭快速搜索(回退到纯滑动窗口)
python main.py --mode video --video path/to/video.mp4 --no-fast
步骤8:预处理方法对比与评估
在同一张图上并排展示三种预处理方法的效果对比,并计算定量评估指标。
三种方法
| 方法 | 说明 |
|---|---|
| HSV 颜色阈值 | 黄色 + 白色车道线颜色提取 |
| Sobel 梯度 | 水平梯度边缘检测 |
| HSV + Sobel 联合 | 当前 advanced 模式默认,综合两者 |
评估指标
| 指标 | 说明 |
|---|---|
| 有效像素数 | 检测到的车道线像素总数(越多越好) |
| R² 决定系数 | 多项式拟合优度(0~1,越接近 1 越好) |
| 检测成功率 | 双侧车道线是否均检测到 |
输出
- 2×3 网格对比图:原图 / 3 种二值化 / 3 种检测结果
- 控制台打印评估指标 + 推荐最优方法
- 保存
step08_compare.jpg
使用方式
# 默认图片
python main.py --mode compare --save-docs
# 指定图片
python main.py --mode compare --image path/to/your_image.jpg --save-docs
参考
- OpenHUTB/nn 贡献指南
- carla_CAM 模块文档(文档与 mkdocs 约定示例)