CARLA 天气鲁棒性测试系统
项目简介
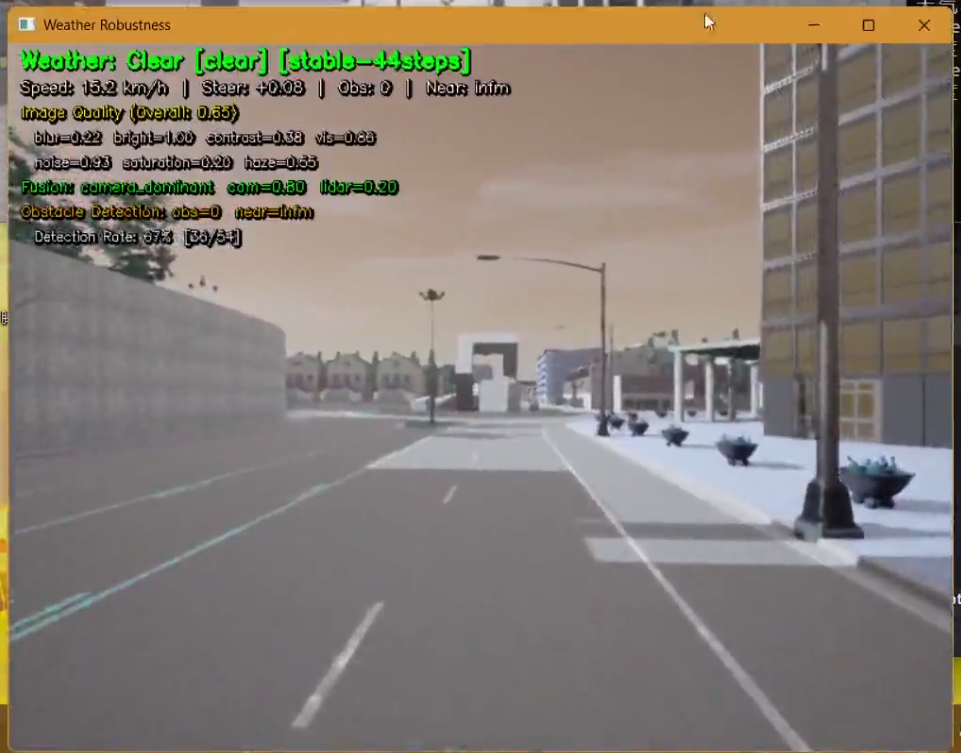
在 CARLA 模拟器中测试自动驾驶车辆在 10 种天气条件下的感知鲁棒性,评估图像质量、传感器融合、障碍物检测和碰撞安全的综合表现。
系统模块组成
| 模块 | 类名 | 职责 |
|---|---|---|
| 道路循迹控制 | RoadFollowController |
沿道路中心线行驶,Waypoint API |
| 图像质量评估 | ImageQualityAssessor |
7 维图像质量分解 |
| 自适应融合 | AdaptiveFusionPerceiver |
图像+LiDAR 动态融合 |
| DBSCAN 障碍物检测 | LidarAdaptivePerceiver |
LiDAR 点云聚类检测 |
| 天气渐变过渡 | WeatherSimulator._update_weather_transition |
天气平滑切换 |
| 鲁棒性评分 | RobustnessScorer |
综合评分输出 |
核心功能
1. 道路循迹控制
# 旧代码:使用 Carla 内置 Autopilot
vehicle.set_autopilot(True) # 不可控
# 新代码:自定义道路循迹控制器
class RoadFollowController:
def __init__(self, world, vehicle):
self._map = world.get_map()
def get_control(self):
waypoint = self._map.get_waypoint(self._vehicle.get_location())
# 计算目标方向,PID 控制转向
...
原代码使用 Carla 内置 Autopilot,无法精确控制。修改后使用 Waypoint API 沿道路中心线行驶,配合 PID 控制转向,保持 30 km/h 匀速。
2. 7 维图像质量评估
| 维度 | 含义 | 权重 |
|---|---|---|
| 亮度 | 平均亮度 (0-1) | 15% |
| 对比度 | 像素标准差 | 15% |
| 清晰度 | Laplacian 方差 | 20% |
| 噪声 | 高频噪声水平 | 10% |
| 色彩饱和度 | 平均饱和度 | 10% |
| 可见度 | 远景可见性 | 15% |
| 结构相似度 | 与晴朗天气对比 | 15% |
# 旧代码:单一质量分数
quality = assess_image(image) # 只输出一个值
# 新代码:7 维分解
class ImageQualityAssessor:
def assess(self, image):
return {
"brightness": ...,
"contrast": ...,
"sharpness": ...,
"noise": ...,
"saturation": ...,
"visibility": ...,
"ssim": ...
}
原代码只输出单一质量分数,无法定位性能瓶颈。修改后分解为 7 个维度,精确定位恶劣天气对图像质量的具体影响。
3. DBSCAN 聚类障碍物检测
# 旧代码:简单距离阈值
obstacles = [p for p in points if p.distance < threshold] # 不准确
# 新代码:先过滤地面点,再 DBSCAN 聚类
class LidarAdaptivePerceiver:
def process_point_cloud(self, points):
# 1. 过滤地面点 (z < -1.8m)
non_ground = [p for p in points if p.z > -1.8]
# 2. 只取前方 30m 范围
front_points = [p for p in non_ground if 0 < p.x < 30 and abs(p.y) < 10]
# 3. DBSCAN 聚类
clustering = DBSCAN(eps=1.5, min_samples=5).fit(front_points)
# 4. 提取障碍物
obstacles = []
for cluster_id in set(clustering.labels_):
if cluster_id == -1: continue # 跳过噪声
cluster_points = front_points[clustering.labels_ == cluster_id]
obstacles.append(cluster_points)
原代码用简单距离阈值过滤,无法区分分散的小障碍物和聚集的大障碍物。修改后先用 DBSCAN 聚类,再提取每个簇的边界框,检测更精确。
4. 自适应传感器融合
# 旧代码:固定权重融合
weight = 0.5 # 固定
fusion = weight * camera + (1 - weight) * lidar
# 新代码:根据图像质量动态调整
class AdaptiveFusionPerceiver:
def update_weights(self, img_quality):
if img_quality < 0.3: # 图像质量极差
self.camera_weight = 0.2
self.lidar_weight = 0.8 # 重度依赖 LiDAR
elif img_quality < 0.6: # 图像质量一般
self.camera_weight = 0.5
self.lidar_weight = 0.5 # 均衡
else: # 图像质量好
self.camera_weight = 0.7
self.lidar_weight = 0.3 # 主要依赖相机
原代码使用固定权重,恶劣天气下相机失效时仍大量依赖相机。修改后根据图像质量动态调整权重,图像差时自动切换到 LiDAR 主导模式。
5. 天气渐变过渡
# 旧代码:天气瞬间切换
world.set_weather(weather) # 突然变化
# 新代码:两阶段过渡
class WeatherSimulator:
def _update_weather_transition(self, target_params):
# 阶段1:稳定期 (STEPS_PER_WEATHER - TRANSITION_STEPS 步)
# 阶段2:过渡期 (TRANSITION_STEPS 步) - 线性插值
if self._is_transitioning:
t = self._transition_step / WEATHER_TRANSITION_STEPS
current = lerp(current_params, target_params, t)
world.set_weather(current)
原代码天气瞬间切换,传感器来不及适应。修改后实现稳定期 + 过渡期两阶段,过渡期内天气参数线性插值,模拟真实天气变化。
6. 视觉效果缓存
# 旧代码:每帧重新生成雨滴/雪花
raindrops = np.random.rand(500, 2) # 每帧 O(n)
# 新代码:缓存雨滴/雪花/沙尘粒子
class WeatherSimulator:
def _add_rain_effect(self, image):
if self._rain_cache is None or self._rain_seed != seed:
self._rain_cache = generate_raindrops(seed)
# 每帧只偏移位置,不重新生成
原代码每帧都重新随机生成雨滴和雪花,CPU 开销大。修改后引入缓存机制,仅在随机种子或尺寸变化时重建,大幅降低每帧计算量。
碰撞检测与评分体系
# 旧代码:简单碰撞计数
collisions += 1 # 只看有没有碰撞
# 新代码:综合评分
class RobustnessScorer:
def compute_robustness_score(self, records):
collision_rate = collisions / total_frames
collision_score = 40 * (1 - collision_rate * 5) # 碰撞安全 (40分)
image_score = 30 * avg_img_quality # 图像质量 (30分)
if avg_img_quality < 0.3: # 恶劣天气
fusion_score = 30 * lidar_ratio # 自适应融合 (30分)
else:
fusion_score = 30 * (1 - lidar_ratio) # 正常天气依赖相机
detect_score = 20 * detection_rate # 检测率 (20分)
return clip(collision_score + image_score + fusion_score + detect_score, 0, 100)
原代码只统计碰撞次数。修改后引入 100 分制综合评分,分四个维度:碰撞安全(40分)、图像质量(30分)、自适应融合(30分)、检测率(20分),并用 np.clip 限制在 0-100。
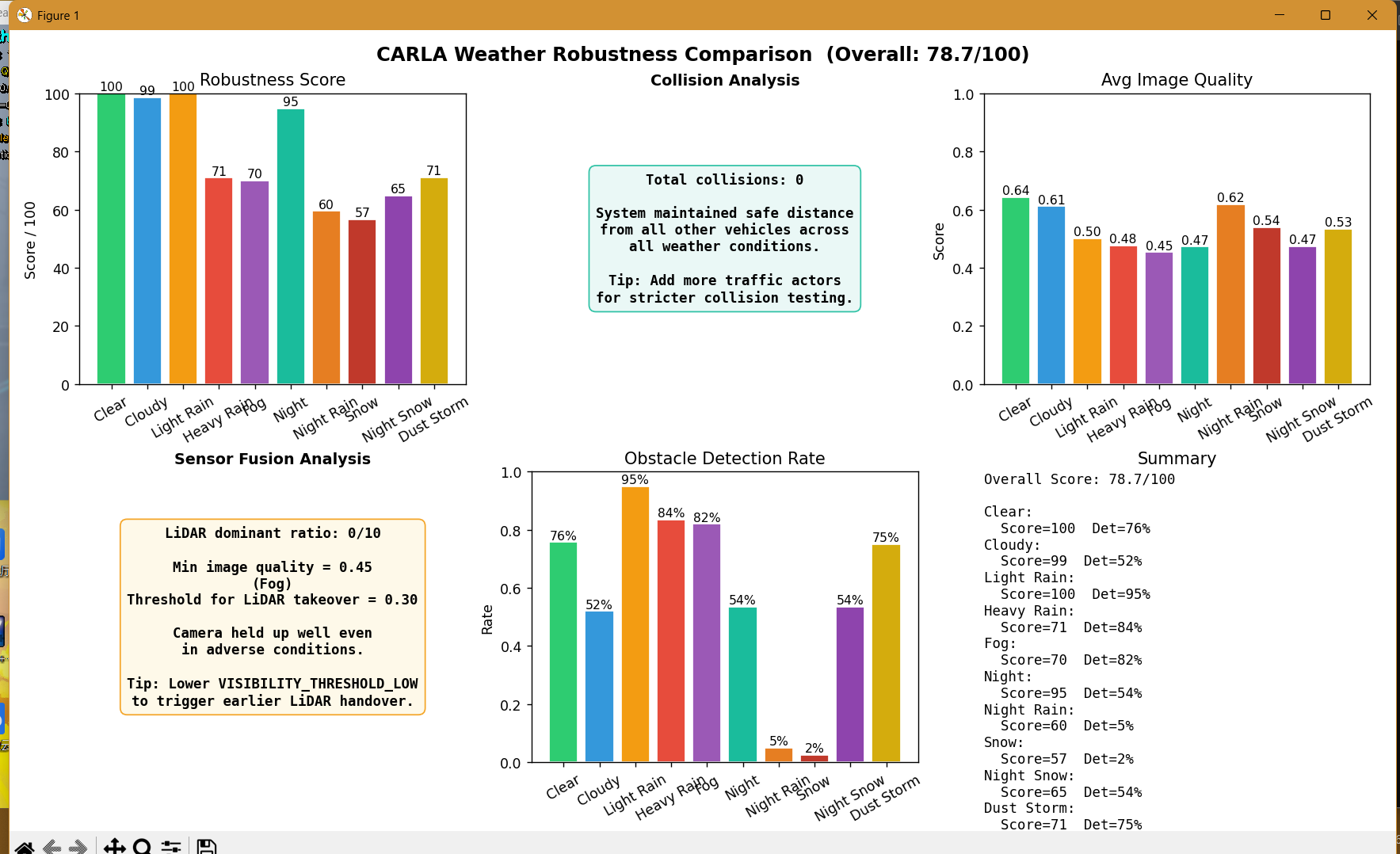
多天气对比图表
# 旧代码:只打印文字报告
print(f"Clear: score={s1}, collisions={c1}")
print(f"Rain: score={s2}, collisions={c2}")
# 新代码:matplotlib 2×3 子图
def _plot_comparison_chart(self, results):
fig, axes = plt.subplots(2, 3, figsize=(14, 8))
# 子图1: 鲁棒性评分柱状图
# 子图2: 碰撞安全分析
# 子图3: 平均图像质量柱状图
# 子图4: 传感器融合分析
# 子图5: 障碍物检测率柱状图
# 子图6: 各天气评分汇总
原代码只打印文字报告,难以直观对比不同天气的表现。修改后使用 matplotlib 生成 2×3 共 6 张子图的对比图表,一目了然。
系统模块组成
| 模块 | 类名 | 职责 |
|---|---|---|
| 道路循迹控制 | RoadFollowController |
沿道路中心线行驶,Waypoint API |
| 图像质量评估 | ImageQualityAssessor |
7 维图像质量分解 |
| 自适应融合 | AdaptiveFusionPerceiver |
图像+LiDAR 动态融合 |
| DBSCAN 障碍物检测 | LidarAdaptivePerceiver |
LiDAR 点云聚类检测 |
| 天气渐变过渡 | WeatherSimulator._update_weather_transition |
天气平滑切换 |
| 鲁棒性评分 | RobustnessScorer |
综合评分输出 |
天气参数一览
| 天气 | 云量 | 降水量 | 雾浓度 | 风速 | 太阳方位角 | 太阳高度角 |
|---|---|---|---|---|---|---|
| Clear | 10 | 0 | 0 | 10 | 0 | 45 |
| Cloudy | 80 | 0 | 0 | 10 | 0 | 30 |
| Light Rain | 60 | 30 | 0 | 20 | 0 | 20 |
| Heavy Rain | 100 | 80 | 5 | 40 | 0 | 15 |
| Fog | 10 | 0 | 80 | 5 | 0 | 30 |
| Night | 10 | 0 | 0 | 10 | 0 | -80 |
| Night Rain | 60 | 30 | 0 | 20 | 0 | -70 |
| Snow | 90 | 30 | 0 | 15 | 0 | 20 |
| Night Snow | 90 | 30 | 0 | 15 | 0 | -70 |
| Dust Storm | 100 | 0 | 90 | 5 | 20 | 0 |

后期计划
- [ ] 添加更多天气类型(如沙尘暴、暴风雪)
- [ ] 支持多车辆并行测试
- [ ] 集成 ROS2 数据流
- [ ] 增加雨天 LiDAR 衰减模拟