机器人仿真系统 (Humanoid Robot Simulation)
背景介绍
这是一个基于 Python 和 MuJoCo 物理引擎的机器人仿真项目。目的是实现机器人行走和巡逻功能。
本项目旨在实现:
距离优先的多目标巡逻与智能避障
场地上存在多个运动的小球,机器人会时刻计算自己离每个小球有多远,谁离得近就追谁,追到了之后就自动换下一个目标,在追到所有小球之后就停止。场景里会有多堵墙壁,机器人一旦碰到某堵墙,就会自动转向,绕开墙后继续追逐目标。
仿人步态与稳定平衡控制
机器人会像人一样交替迈腿、摆臂,同时通过腰部的扭动和质心调整让自己不会摔倒。所有关节的力量都限制在安全范围内,避免机器人突然飞出去或原地抽搐
仿真运行与可视化跟踪
启动 MuJoCo 的 3D 窗口,相机自动跟随机器人,保证它始终在屏幕中央。同时每 2 秒在控制台打印一次当前状态(位置、目标距离、最近障碍物等),按 Ctrl+C 可以随时结束并看总结报告。
新增功能
参数透传功能
self.target_move_speed = 0.2 # Slow target movement for stability
self.forward_speed = 0.05 # Reduced speed to prevent flying (fix disappearing issue)
self.target_move_speed = args.target_move_speed if args else 0.2 # 动态目标移动速度
self.forward_speed = args.forward_speed if args else 0.05 # 机器人前进速度
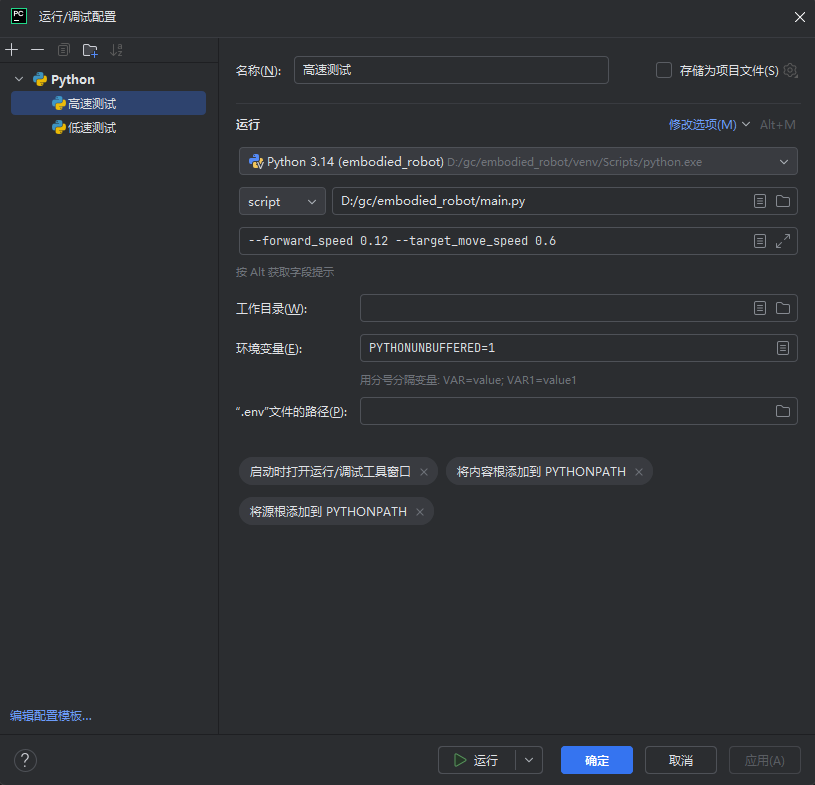
之前的代码把参数写死在代码里,想要修改参数就必须回到脚本中修改代码,很麻烦而且容易出错。现在引入了argparse 库来规范地接收参数,可以在 PyCharm 的 Parameters 配置框中(或者直接在终端里)输入参数,无需修改代码。
移除阻塞式的 input() (适配自动化部署)
# Ask for auto-install
if input("\n📥 Auto-install missing packages? (y/n): ").lower() == 'y':
try:
subprocess.run(
[sys.executable, "-m", "pip", "install"] + missing_packages,
check=True
)
print("✅ Packages installed successfully")
except subprocess.CalledProcessError as e:
print(f"❌ Package installation failed: {e}")
sys.exit(1)
def get_user_input_with_timeout(timeout=5):
print(f"\n📥 Auto-install missing packages? (y/n) [将在 {timeout} 秒后默认选择 'y']: ", end='', flush=True)
user_response = [None]
def wait_for_input():
try:
user_response[0] = input()
except EOFError:
pass
原代码当检测到用户没有安装标准库时,会自动弹出选项让用户判断是否安装库,但问题在于,如果用户不输入选项,进程就会永久停留在这一步。
修改后,当进程在此停留timeout的时间后,如果用户依然没有输入,程序就会自动选择y并开始安装标准库。
依赖项配置外置
def check_dependencies():
"""
Check required packages installation
"""
required_packages = [
"mujoco",
"numpy"
]
def check_dependencies():
"""
Check required packages installation by reading requirements.txt
"""
project_root = Path(__file__).resolve().parent
req_file = project_root / "requirements.txt"
原代码写死了项目要安装的库,如果以后需要安装其它库的时候就需要修改代码,非常麻烦。
修改后,新增了requirements.txt文件,将依赖项全放置在其中,方便用户查看项目需要哪些依赖,也方便后面的增删。

以上内容均在原项目上修改,目的是方便项目的安装和调试,之后开始进行机器人步态调试。
机器人步态调试
原项目没有实现机器人站立和行走的功能,在原项目的基础上,我进行了多种尝试。
出生点穿模/电机力量过小
出生点穿模爆炸: 设置的初始高度(z=0.8)可能太低了。如果机器人的脚在第 0 帧时嵌在了地板内部,MuJoCo 的物理引擎为了解决“物体穿透”,会瞬间施加一个成千上万牛顿的排斥力,直接把它弹飞、抽搐。
电机力量过小: 代码里有一句 self.max_ctrl_amplitude = 0.8。这意味着无论机器人怎么拼命想站稳,发出的电机指令都被死死限制在了 0.8。这点力气根本不足以对抗重力支撑起它自己的体重。
应对这两个问题,我做了如下调节:
self.balance_kp = 120.0 # 增强平衡控制器的刚度,让腰板挺直
self.max_joint_velocity = 2.0 # 放宽关节限速
self.max_ctrl_amplitude = 5.0 # ✨ 核心修复:把电机最大输出拉高,给它支撑体重的力气!
self.data.qpos[2] = 0.95 # ✨ 核心修复:把出生点太高一点,让它处于悬空状态,避免脚插进地板里
if elapsed_time < self.stabilization_phase:
# ✨ 加入“上帝之手”:给躯干施加向上的外力,像提着衣领一样让它慢慢站稳落地
if self.torso_id != -1:
# 提拉力随着时间从 200N 线性递减到 0N
lift_force = 200.0 * (1.0 - (elapsed_time / self.stabilization_phase))
self.data.xfrc_applied[self.torso_id][2] = lift_force
self._maintain_balance(elapsed_time)
# Clip all control commands during stabilization
for i in range(self.model.nu):
self.data.ctrl[i] = self._clip_control_command(self.data.ctrl[i])
return
else:
# ✨ 稳定期结束后,撤销上帝之手,让机器人完全靠自己的双腿站立
if self.torso_id != -1:
self.data.xfrc_applied[self.torso_id][2] = 0.0
但是修改代码后小人依然是立刻直接落地,没有悬停,也没有站立起来。怀疑是施加的拉力太小,在调控拉力之后仍然没有变化,于是寻找其它原因。
碰撞穿模惩罚机制
在 MuJoCo 中,只要机器人的脚底板和地面发生了哪怕 $0.1$ 毫米的“穿透(Penetration)”,物理引擎为了把它们分开,会瞬间产生高达数万牛顿的排斥力。这个力比刚才算的几百牛顿的“体重提拉力”大了几十倍,所以机器人的力学状态瞬间就爆炸了,直接被拍在地上抽搐。
直接在每一帧强行改写它躯干的空间坐标。就像把它用钉子钉在半空中一样,无视重力,无视碰撞,强行让它在空中把腿伸直,然后再“拔掉钉子”让它落地。
# Step 5: Initial stabilization phase (no movement, only balance)
if elapsed_time < self.stabilization_phase:
# ✨ 核弹级修复:时空绝对锁死!
# 直接在内存底层把机器人“钉”在空中,无视任何物理法则
# 1. 强行锁定根节点空间坐标 (悬空在 0.95m 处)
self.data.qpos[0] = 0.0
self.data.qpos[1] = 0.0
self.data.qpos[2] = 0.95
# 2. 强行锁定绝对垂直姿态 (四元数 [w, x, y, z])
self.data.qpos[3:7] = [1.0, 0.0, 0.0, 0.0]
# 3. 强行清零六轴速度 (禁止任何移动和旋转)
self.data.qvel[0:6] = 0.0
# 清除之前没用的外力
if self.torso_id != -1:
self.data.xfrc_applied[self.torso_id][2] = 0.0
# 在被死死钉在空中的这两秒内,让四肢活动,摆出站立准备姿势
self._maintain_balance(elapsed_time)
for i in range(self.model.nu):
self.data.ctrl[i] = self._clip_control_command(self.data.ctrl[i])
return
可是依然没有变化。
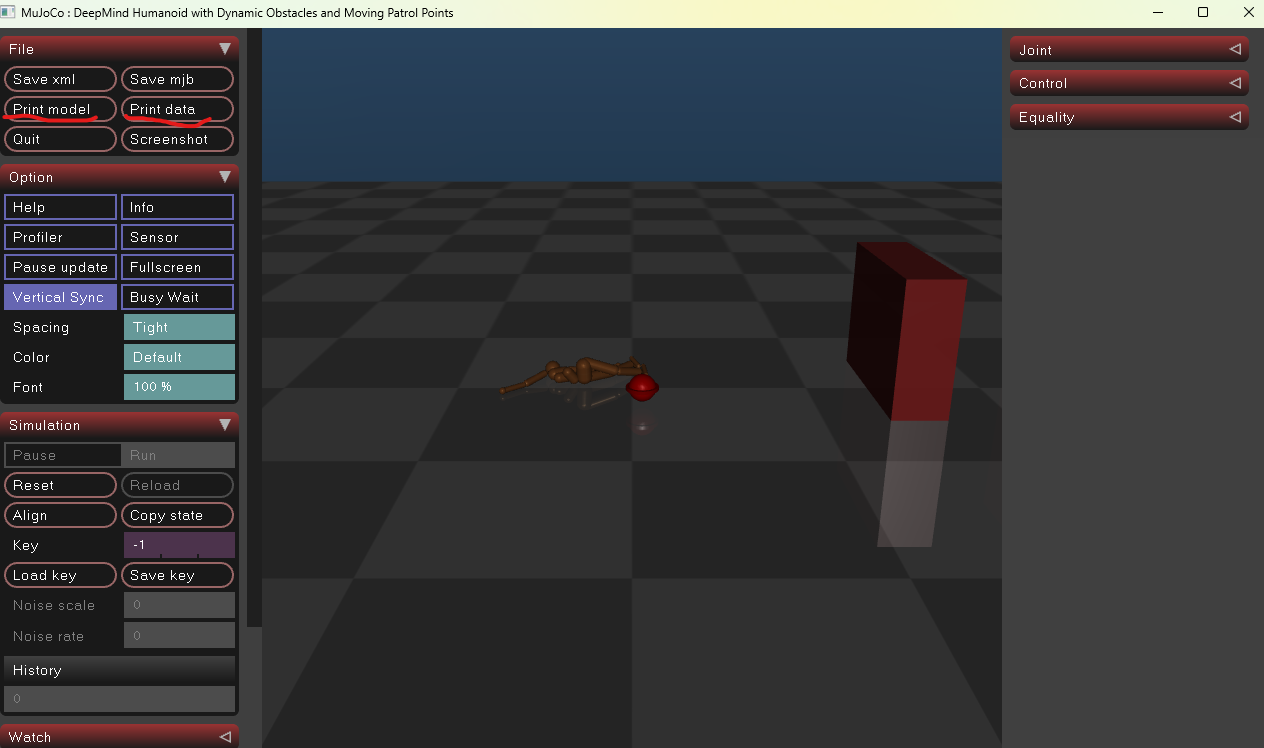
寻址出错。
提取了model文件和data文件,进一步分析,发现发现Joint ID(关节ID) ≠ DOF ID(速度地址),也就是说对于脚部关节的速度设置可能移动到了腰部,所以小人在以脚步关节的速度翻转。
可能是项目原作者只考虑的机器人模型,没有考虑场景里加入了红色的巡逻点(patrol_slide)、加入了会动的墙壁(wall_slide)。在 MuJoCo 读取 XML 时,数据的地址错位,导致机器人在原地抽搐。
于是尝试寻找真正的内存地址:
def _get_joint_vel_id(self, joint_name):
"""Get joint velocity ID for a given joint name"""
mapped_name = self.joint_name_mapping.get(joint_name, joint_name)
joint_id = mujoco.mj_name2id(self.model, mujoco.mjtObj.mjOBJ_JOINT, mapped_name)
if joint_id != -1:
# ✨ 史诗级底层修复:绝对不能直接返回 joint_id!
# 必须通过 jnt_dofadr 查询该关节在 qvel 数组中真正的内存地址!
return self.model.jnt_dofadr[joint_id]
return -1
但是,还是没有变化,目前仍然没有找到问题所在。
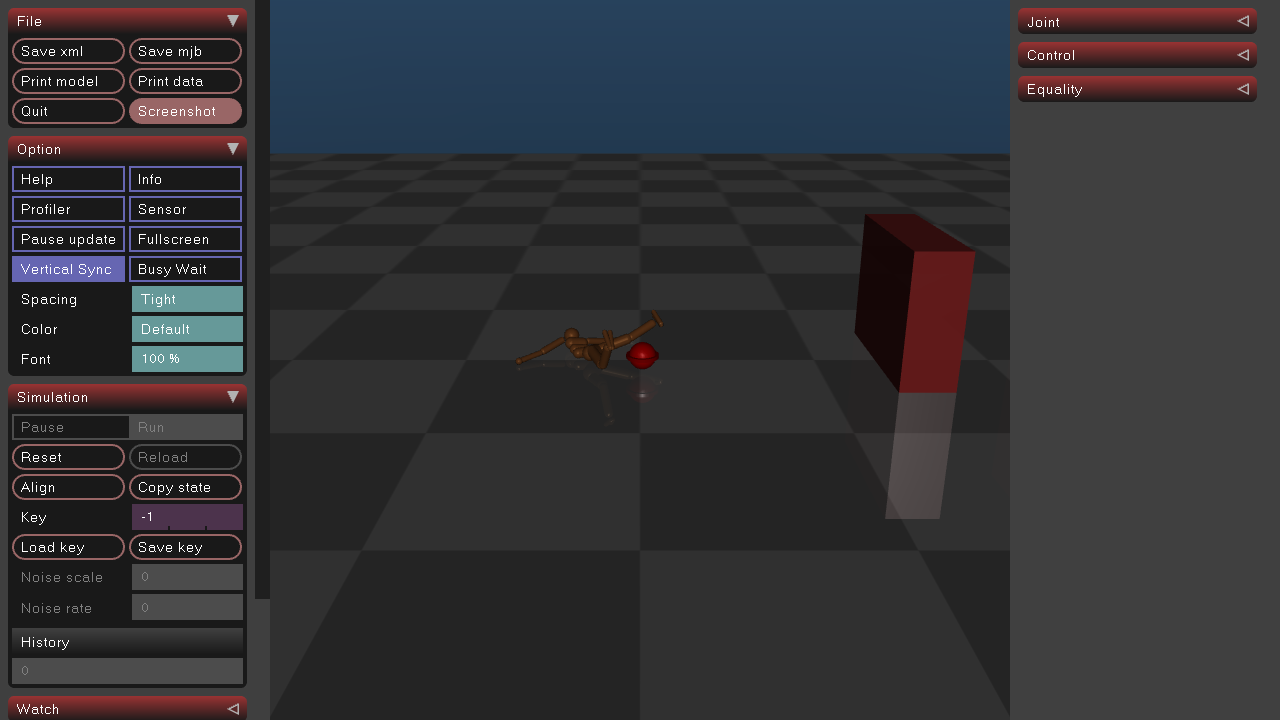
当前,人形机器人仍然保持原地抽搐状态。
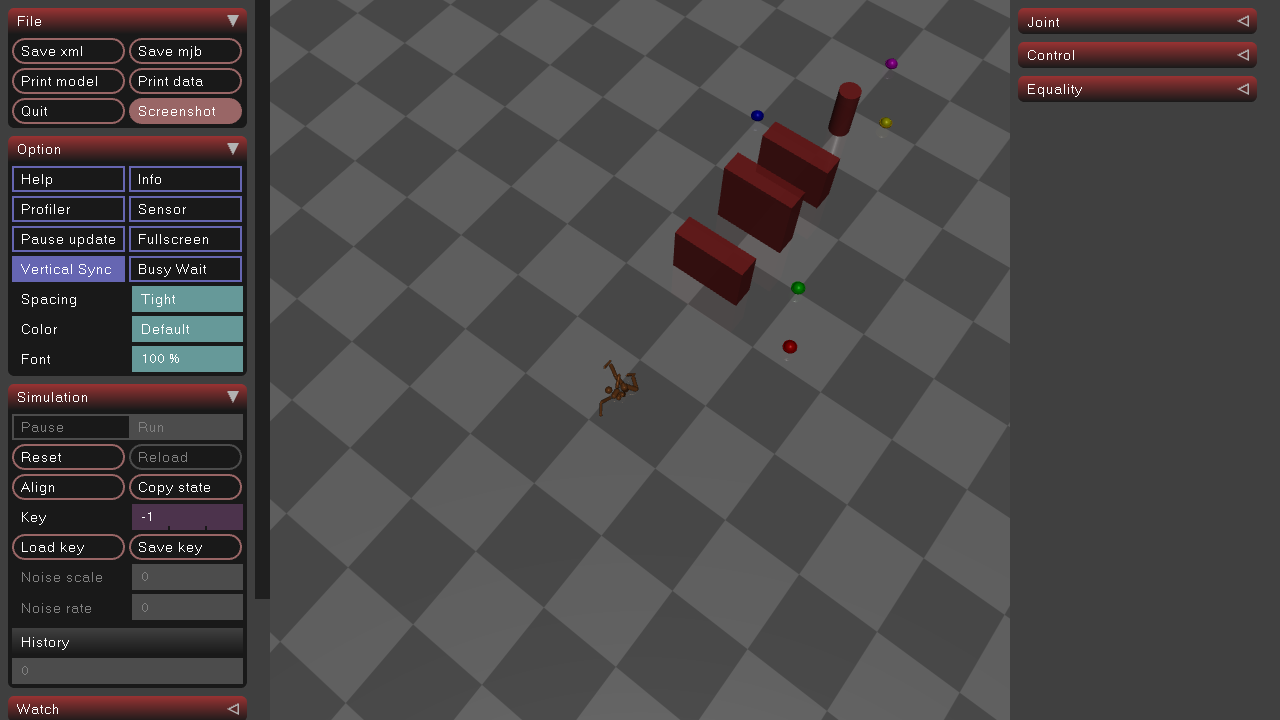
ant动态巡逻避障
在调试机器人步态无果后,暂时放弃,转向动态巡逻于避障的研究
这次,选取了结构简单的ant模型,重点关注如何实现追踪小球和智能避障。
重构代码
首先,重构了原项目的机器人行动代码move_straight.py,在其基础上构建了对应ant模型的新模块。
感知模块:perception.py
功能:负责“看”。它不决定怎么走,只负责告诉大脑周围有什么。
- 雷达/射线探测:封装 MuJoCo 的
data.contact或通过计算geom距离,判断前方是否有障碍物。 - 距离计算:提供一个简单的函数,返回距离最近障碍物的距离和角度。
- 目标向量:计算当前位置到下一个巡逻点的欧几里得距离和相对方位角。
决策模块:planner.py
功能:负责“想”。它是机器人的“大脑”。
- 巡逻逻辑:管理巡逻点队列(Target Queue),判断是否到达当前点并切换下一个。
- 避障算法:根据
perception.py传来的数据,计算一个“期望速度”和“期望朝向”。 - 逻辑示例:如果前方 1.2m 有障碍物,将期望朝向向右偏移 30 度。
- 状态机:管理机器人的状态(巡逻中、避障中、停滞待机)。
运动控制模块:locomotion.py
功能:负责“走”。它只管把“大脑”的要求变成关节力矩。
- 基础步态发生器:为 Ant 的 8 个关节生成周期性的正弦波(爬行波形)。
- 转向执行:接收大脑的“转向”指令,通过改变左右两侧腿的频率或幅度实现转向。
- PD 控制器:通用的关节力矩计算公式($Torque = Kp \cdot error - Kd \cdot velocity$)。
仿真引擎模块:env_manager.py
功能:负责“活”。它是物理世界的宿主。
- 模型加载:读取
ant_config.py加载 XML。 - 软启动管理:执行我们之前讨论的“开局锁定”逻辑,防止抽搐。
- 主循环:调用上述三个模块,完成
mj_step。
直线行走
在重构代码后,发现ant机器人在原地扭动,不行走,检查发现是关节正负方向错误导致原地扭动
修改后能够直线行走
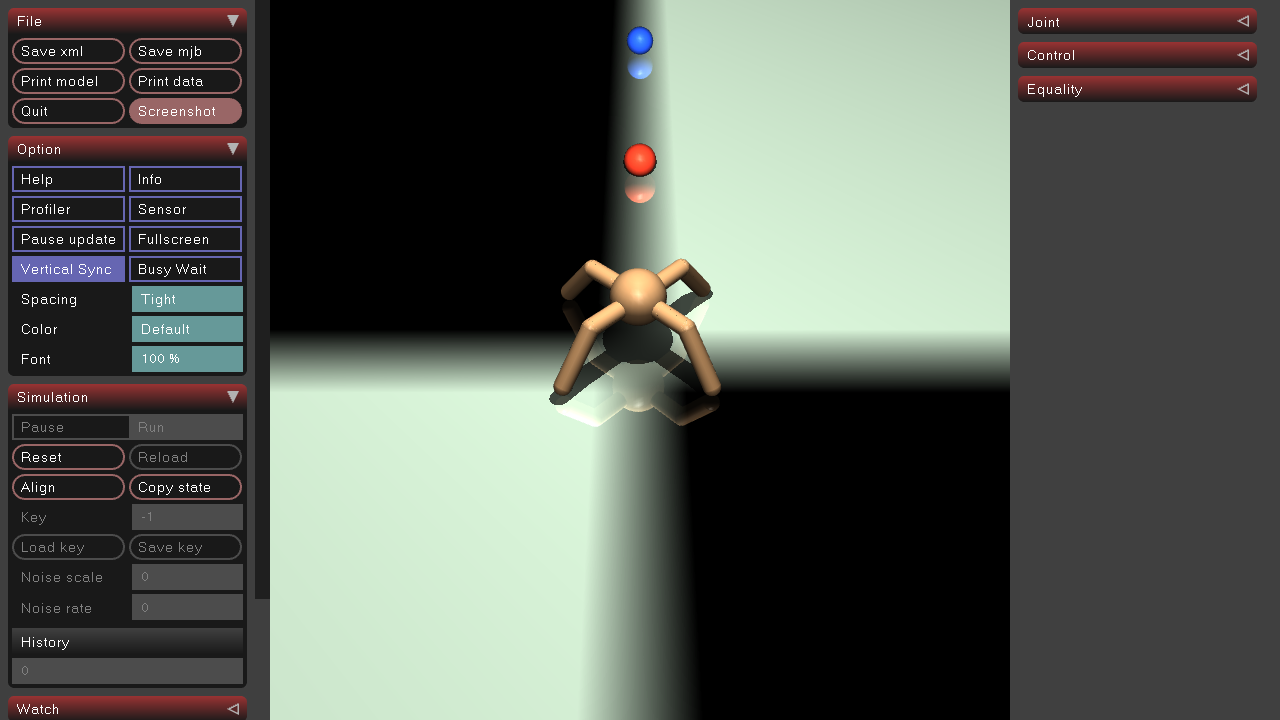
追踪小球
在小球前进方向上设置两个小球,当机器人碰到较近的小球后,再追踪较远的小球,碰到所有小球后停止
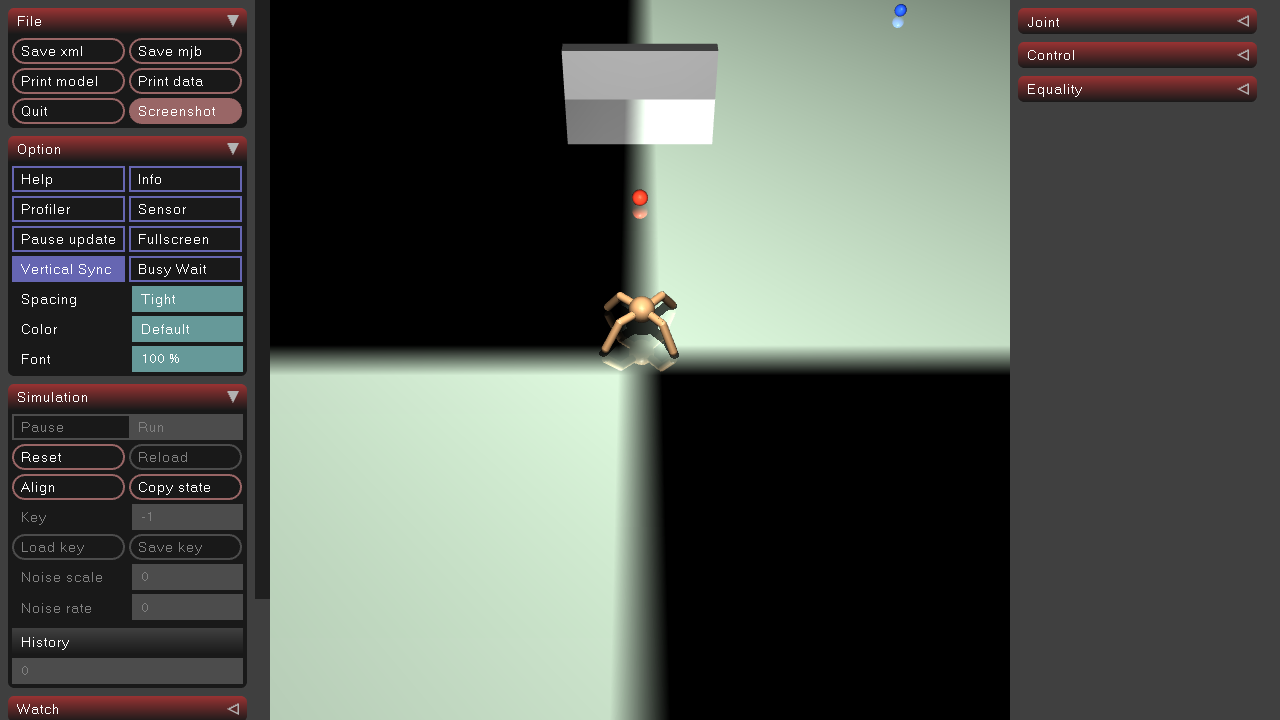
智能避障
在两个小球之间加上一堵墙,当机器人碰到墙后转向,绕过墙后继续追踪小球
动态小球追踪
让两个小球以一定速率运动,机器人动态追踪小球。
后期计划
项目后期有两个方向:
1.步态调整
重新转回人形机器人模型,尝试调整其步态,让其做到站立并行走
2.复杂场景
尝试构建更为复杂的场景,研究机器人在复杂环境中的巡逻避障能力