CARLA 自动驾驶系统辅助监控器
多传感器融合 · 环境感知 · 安全预警 · 自动化评估
目录
- 项目概述
- 系统架构
- 核心功能详解
- 1. 多传感器融合感知
- 2. 多环境与天气模拟
- 3. 安全预警系统
- 4. 极端危险场景自动生成
- 5. KPI 自动化评估与报告
- 6. 数据记录与回放
- 7. 可视化界面
- 项目结构
- 运行环境与依赖
- 快速启动
- 按键操作说明
- 适用场景与价值
- 扩展方向
- License
项目概述
本项目基于 CARLA 开源自动驾驶仿真平台,构建了一套完整的多传感器融合、环境感知、安全预警与自动化评估系统。项目覆盖从传感器数据采集、多环境场景模拟、危险行为检测到性能指标量化评估的全链路,可用于自动驾驶算法验证、边界场景测试、毕业设计与教学演示。
核心亮点:
- 多传感器融合:四路 RGB 相机 + 激光雷达点云 + BEV 鸟瞰图
- 多环境模拟:晴天 / 雨天 / 雾天 / 夜间一键切换
- 安全预警:前车碰撞预警(FCW)、车道偏离检测、红绿灯监测
- 危险场景:自动生成急刹、鬼探头、加塞、落物等极端工况
- KPI 评估:碰撞率、车道保持率、TTC 等指标自动计算与报告生成
- 数据回放:黑匣子记录 + 场景录制/回放
系统架构
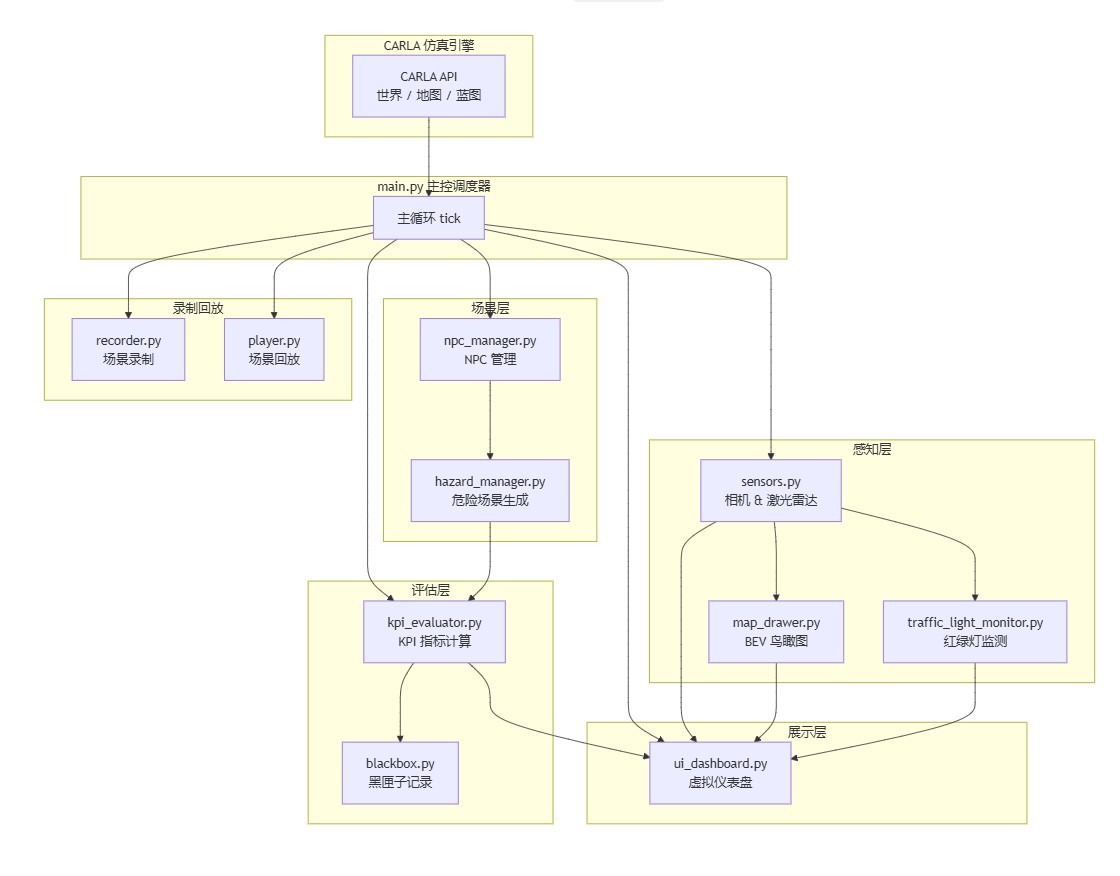
系统采用模块化设计,各功能解耦为独立模块,由 main.py 统一调度:
核心功能详解
1. 多传感器融合感知
系统部署了多类传感器,构建车辆周围 360° 的感知能力:
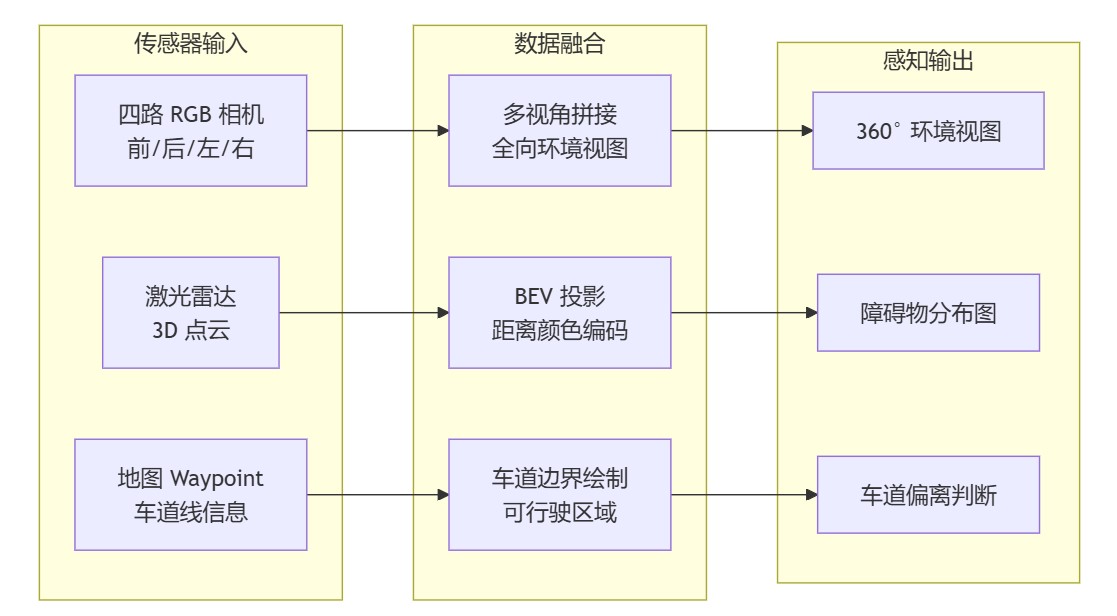
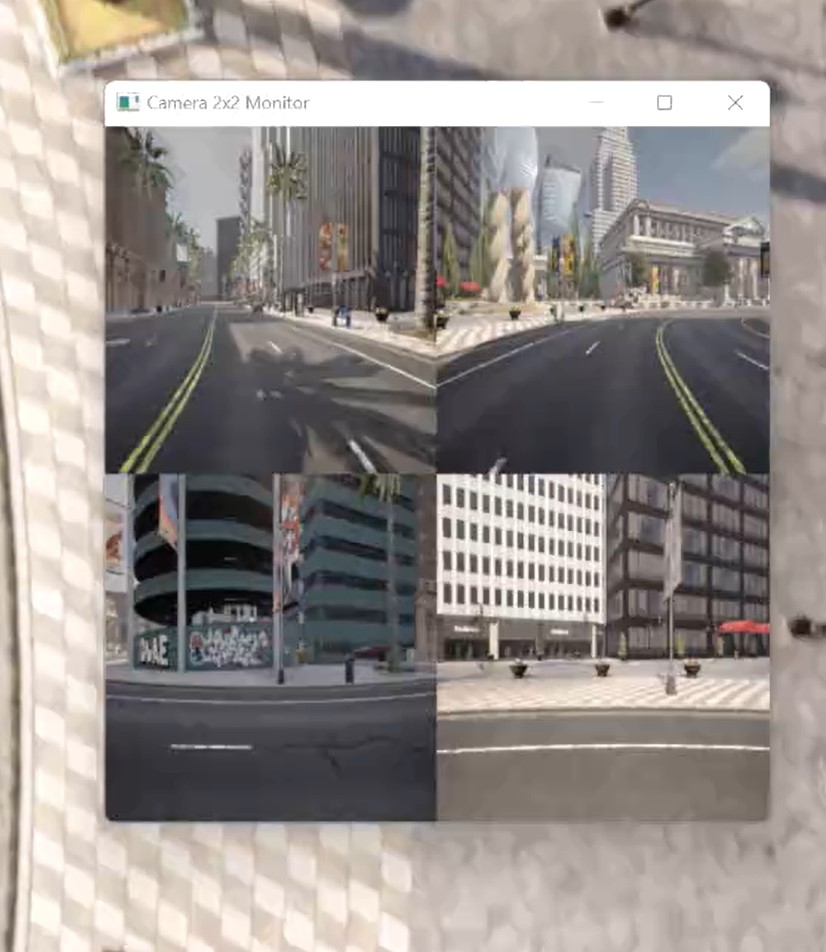
- 四路 RGB 相机:前、后、左、右四视角实时画面拼接,提供车辆全向环境视图,消除盲区
- 激光雷达点云可视化:将三维点云投影到 BEV(鸟瞰图),以颜色编码区分障碍物距离,直观展示周边障碍物分布
- 车道线与可行驶区域绘制:结合 CARLA 地图 Waypoint 信息,在 BEV 中高亮车道边界与可行驶区域,辅助判断车道偏离
设计思路:多传感器融合是自动驾驶感知的基础。通过相机获取丰富纹理信息,激光雷达获取精确距离信息,BEV 视角提供全局态势感知,三者互补构成完整的感知链路。
2. 多环境与天气模拟
支持一键切换四种典型天气环境,模拟不同光照与路面条件:
| 天气模式 | 光照条件 | 路面状态 | 感知影响 |
|---|---|---|---|
| 晴天 | 充足自然光 | 干燥 | 基准环境,感知最佳 |
| 雨天 | 光照减弱 | 湿滑积水 | 相机清晰度下降,雷达噪点增加 |
| 雾天 | 严重散射 | 微湿 | 能见度骤降,远距目标丢失 |
| 夜间 | 仅有车灯 | 干燥 | 相机暗噪增加,远距感知受限 |
应用场景:天气模拟可用于验证感知算法在不同环境下的鲁棒性。例如测试雨雾天气下的目标检测准确率衰减,或夜间场景下的车道线识别能力。
3. 安全预警系统
实时监控车辆行驶安全状态,提供多维度预警:
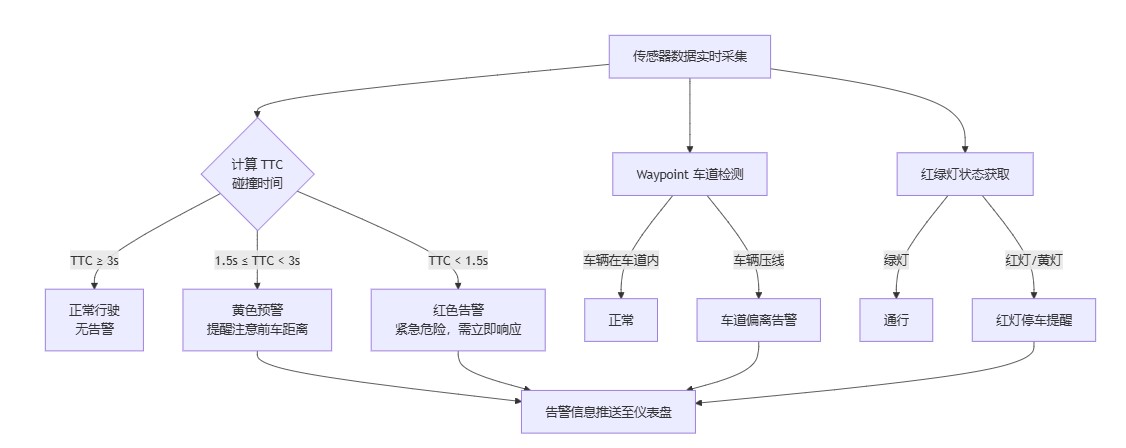
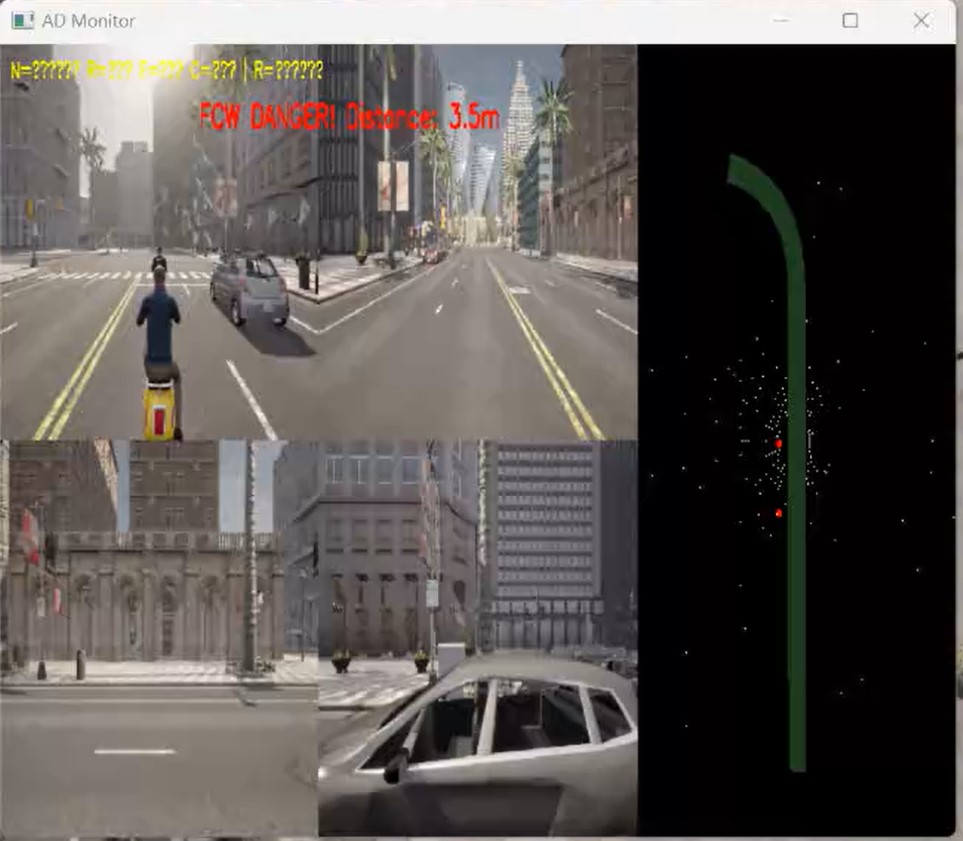
- 前车碰撞预警(FCW):实时计算与前车的距离和碰撞时间(TTC),当距离过近时,屏幕闪烁红/黄告警文字,提示危险等级
- 黄色预警:TTC < 3s,提醒注意
- 红色告警:TTC < 1.5s,紧急危险
- 车道偏离检测:基于地图 Waypoint 判断车辆是否压线,为车道保持率指标提供数据支持
- 红绿灯状态监测:实时获取前方红绿灯状态,并在仪表盘上方可视化显示,支持红灯停、绿灯行的场景验证
4. 极端危险场景自动生成
系统可随机触发四类高危场景,用于算法边界性能测试:
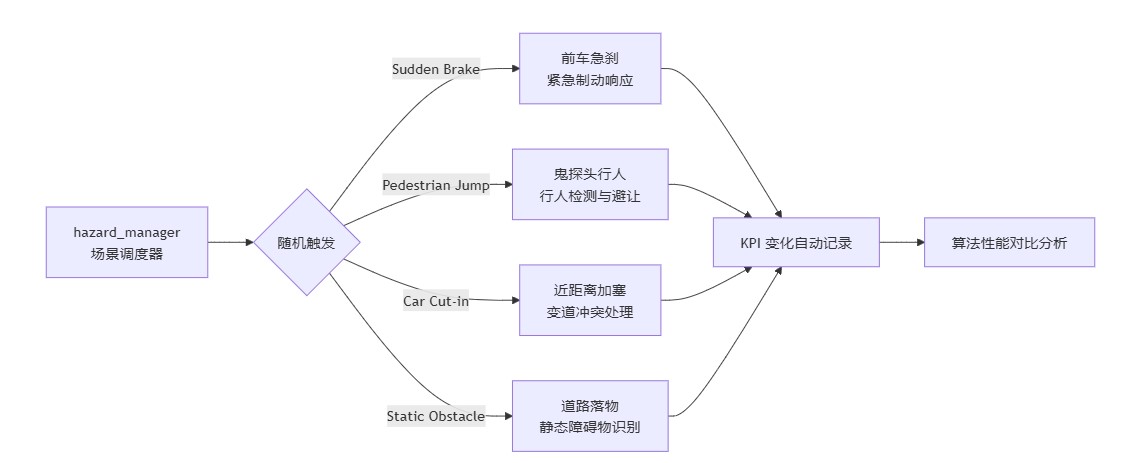
| 场景类型 | 英文标识 | 触发方式 | 测试目的 |
|---|---|---|---|
| 前车急刹 | Sudden Brake | 前方车辆突然减速 | 紧急制动响应 |
| 鬼探头行人 | Pedestrian Jump | 行人从遮挡物后方突然出现 | 行人检测与避让 |
| 近距离加塞 | Car Cut-in | 旁车突然切入本车道 | 变道冲突处理 |
| 道路落物 | Static Obstacle | 前方出现静止障碍物 | 静态障碍物识别 |
场景触发后,系统自动记录 KPI 变化,便于对比不同算法在极端工况下的表现差异。
5. KPI 自动化评估与报告
系统实时计算并记录多项关键性能指标,程序退出时自动生成 kpi_report.txt 报告:
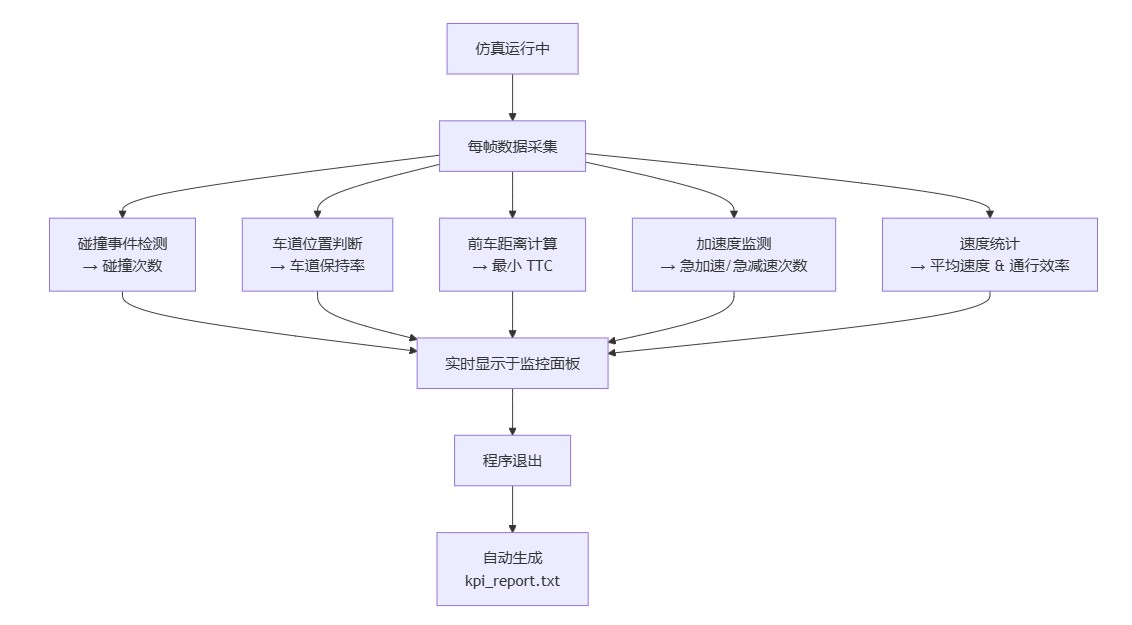
| 指标 | 说明 | 评估维度 |
|---|---|---|
| 碰撞次数 | 仿真过程中发生的碰撞事件总数 | 安全性 |
| 车道保持率 | 车辆保持在车道内的时间占比 | 稳定性 |
| 最小 TTC | 全程与前车的最小碰撞时间(Time-To-Collision) | 安全裕度 |
| 急加速/急减速次数 | 超过阈值的加减速行为次数 | 舒适性 |
| 平均速度 | 仿真期间的平均车速 | 效率 |
| 通行效率 | 基于平均车速的通行效率评分 | 综合效率 |
所有指标实时显示在监控画面右上角,支持过程观察与事后复盘。
6. 数据记录与回放
- 黑匣子数据记录:将车辆位置、速度、航向角、加速度等数据持续写入
blackbox.csv,支持事后分析与轨迹复现 - 场景录制与回放:支持按键快捷操作,便于复现特定工况
R键 → 开始录制S键 → 停止录制并保存P键 → 回放已保存的场景
7. 可视化界面
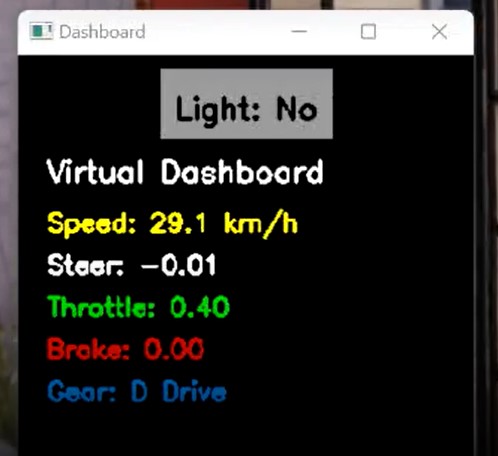
- 主监控窗口:四路相机拼接 + BEV 鸟瞰图 + KPI 指标面板 + 告警信息,一站式掌控全局
- 仪表盘窗口:实时显示车速、红绿灯状态,界面清晰直观,模拟真实驾驶体验
项目结构
carla-rl-project-main/
├── main.py # 主程序入口,统一调度各模块
├── requirements.txt # 项目依赖库
├── README.md # 项目说明文档
└── core/ # 模块化功能目录
├── __init__.py # 模块初始化
├── sensors.py # 相机与激光雷达管理
├── npc_manager.py # NPC车辆与行人生成管理
├── recorder.py # 场景录制
├── player.py # 场景回放控制
├── blackbox.py # 车辆数据黑匣子记录
├── map_drawer.py # BEV鸟瞰图与车道绘制
├── ui_dashboard.py # 虚拟仪表盘
├── traffic_light_monitor.py # 红绿灯状态监测
├── kpi_evaluator.py # KPI指标自动评估
└── hazard_manager.py # 极端危险场景生成
运行环境与依赖
基础环境
| 依赖项 | 版本要求 | 说明 |
|---|---|---|
| Python | 3.7 ~ 3.10 | 推荐 3.8+ |
| CARLA | 0.9.12+ | 推荐 0.9.16 |
| 操作系统 | Windows / Linux | 需支持 CARLA 模拟器 |
Python 依赖库
numpy>=1.21.0
opencv-python>=4.5.5.62
carla>=0.9.14
快速启动
1. 安装 CARLA 模拟器
从 CARLA Release 下载对应版本,解压后运行:
# Linux
./CarlaUE4.sh
# Windows
CarlaUE4.exe
等待地图加载完成,出现仿真窗口即表示启动成功。
2. 安装 Python 依赖
pip install -r requirements.txt
注意:
carlaPython 包的版本需与 CARLA 模拟器版本匹配。CARLA 0.9.14+ 对应carla>=0.9.14。
3. 运行主程序
python main.py
启动后会出现两个窗口:主监控窗口(四路相机 + BEV + KPI)和仪表盘窗口(车速 + 红绿灯)。
按键操作说明
| 按键 | 功能 | 分类 |
|---|---|---|
n |
切换白天/夜间模式 | 天气控制 |
r |
开启雨天模式 | 天气控制 |
f |
开启雾天模式 | 天气控制 |
c |
恢复为晴天 | 天气控制 |
R |
开始录制场景 | 录制回放 |
S |
停止录制并保存 | 录制回放 |
P |
回放已保存的场景 | 录制回放 |
ESC |
退出程序 | 系统控制 |
适用场景与价值
| 场景 | 说明 |
|---|---|
| 毕业设计/课程设计 | 完整的系统架构与功能模块,可直接作为课程设计或毕设项目,覆盖感知、决策、评估全链路 |
| 算法验证平台 | 支持不同天气、高危场景下的自动驾驶算法性能测试与对比,快速迭代验证 |
| 教学演示 | 直观的可视化界面,适合向他人展示自动驾驶感知与安全预警的基本原理 |
| 未来扩展 | 模块化设计预留了控制算法接口,可快速接入 PID、MPC 或强化学习控制器 |
扩展方向
本项目采用模块化架构,预留了多个扩展接口,欢迎在此基础上进行二次开发:
- 控制算法接入:在
core/下新增控制器模块,接入 PID / MPC / 强化学习等控制算法 - 更多传感器:扩展
sensors.py,添加深度相机、GNSS、IMU 等传感器 - 场景库扩充:在
hazard_manager.py中添加更多危险场景模板 - 多车协同:基于
npc_manager.py扩展多车通信与协同决策 - ROS 桥接:通过 CARLA ROS Bridge 将数据发布到 ROS 生态,对接更丰富的算法栈
License
本项目基于 CARLA 开源平台构建,遵循 MIT License。