人形机器人 G1
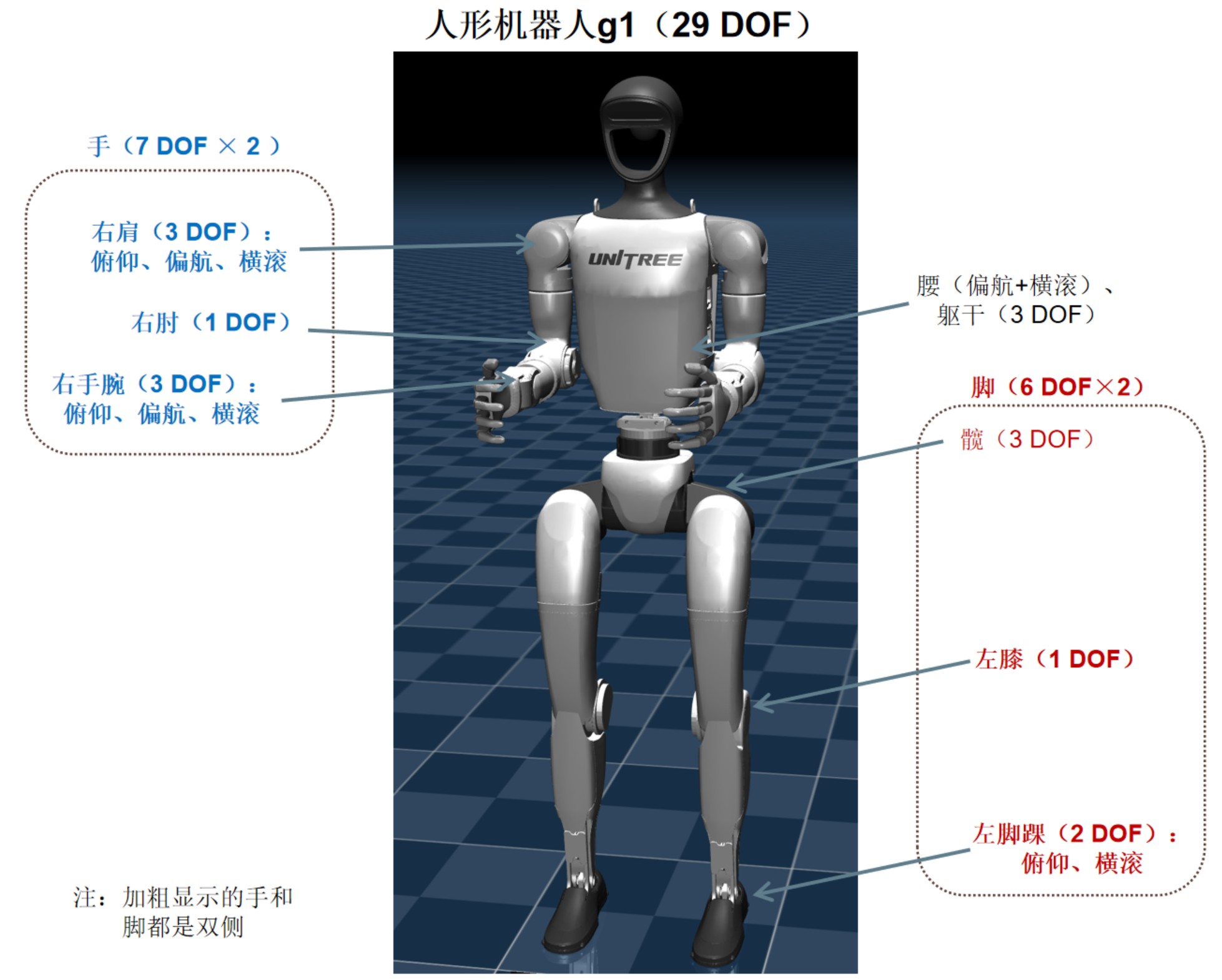
该模型 g1_29dof_rev_1_0.xml 为插件的开发和测试所使用的标准模型,包含 29 个自由度,包括左腿(6 DOF)、右腿(6 DOF)、腰+躯干(3 DOF)、左肩(7 DOF)、右肩(7 DOF)。
包含机器人本地部分的 <default>、<asset>、<wordbody>、29 个关节执行器 <actuator>、躯干和盆骨的加速度计和陀螺仪 <sensor> 和场景的 <statistic>、<visual>、<asset>、<worldbody>。
该模型 g1_29dof_rev_1_0.xml 为插件的开发和测试所使用的标准模型,包含 29 个自由度,包括左腿(6 DOF)、右腿(6 DOF)、腰+躯干(3 DOF)、左肩(7 DOF)、右肩(7 DOF)。
包含机器人本地部分的 <default>、<asset>、<wordbody>、29 个关节执行器 <actuator>、躯干和盆骨的加速度计和陀螺仪 <sensor> 和场景的 <statistic>、<visual>、<asset>、<worldbody>。