调试可视化
用于在 PIE 期间检查 MuJoCo 仿真的运行时叠加层。所有切换开关均位于 UMjDebugVisualizer(由 AAMjManager 自动创建)上,并由 UMjInputHandler 中的数字行热键驱动。可在 Manager Actor 的“详细信息(Details panel)”面板中实时调整公开的属性。
快捷键
| 键 | 切换 | 目的 |
|---|---|---|
1 |
接触力箭头 | 每个有效接触点处都有黄色箭头,箭头大小按法向力的大小缩放。 |
2 |
铰链视觉网格可见性 | 隐藏导入的视觉网格(保留碰撞/调试叠加层)。 |
3 |
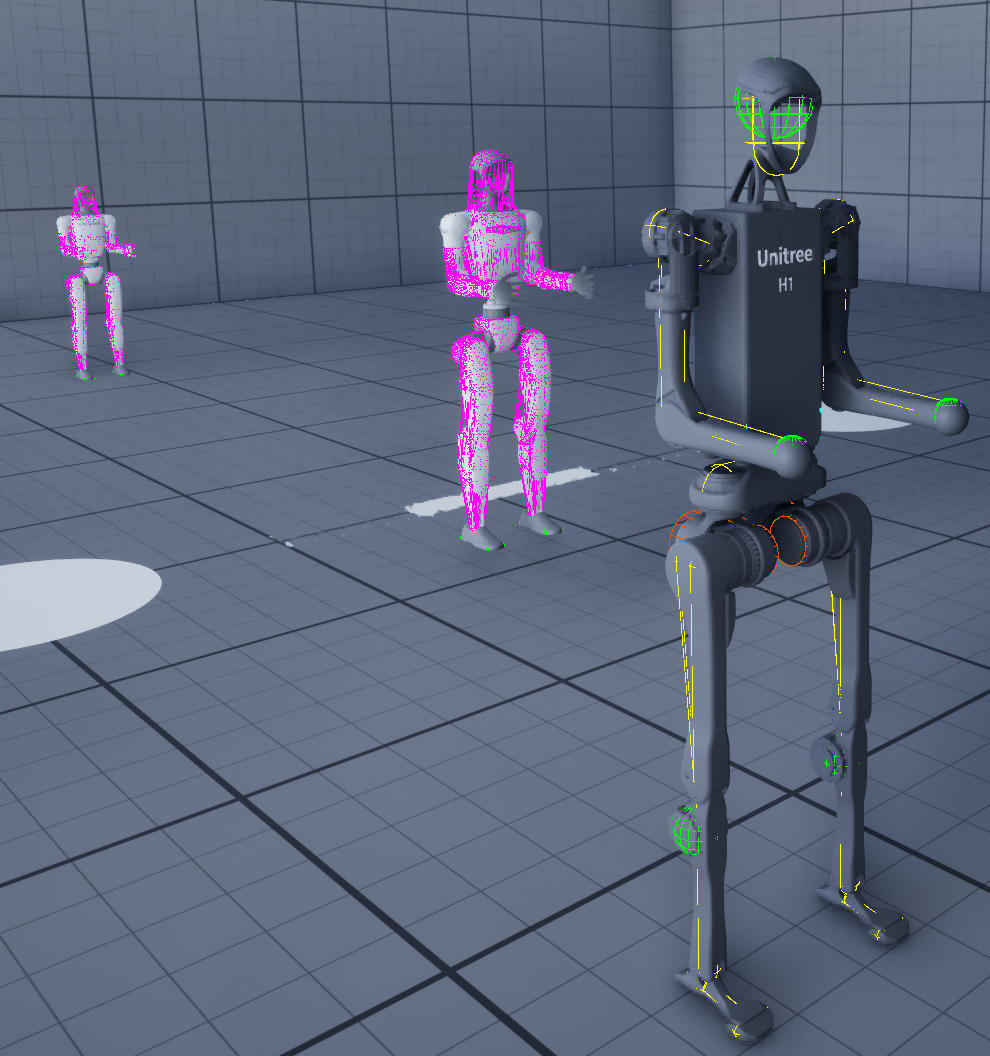
关节碰撞线框图 | 铰链上每个碰撞几何体的洋红色线框图。 |
4 |
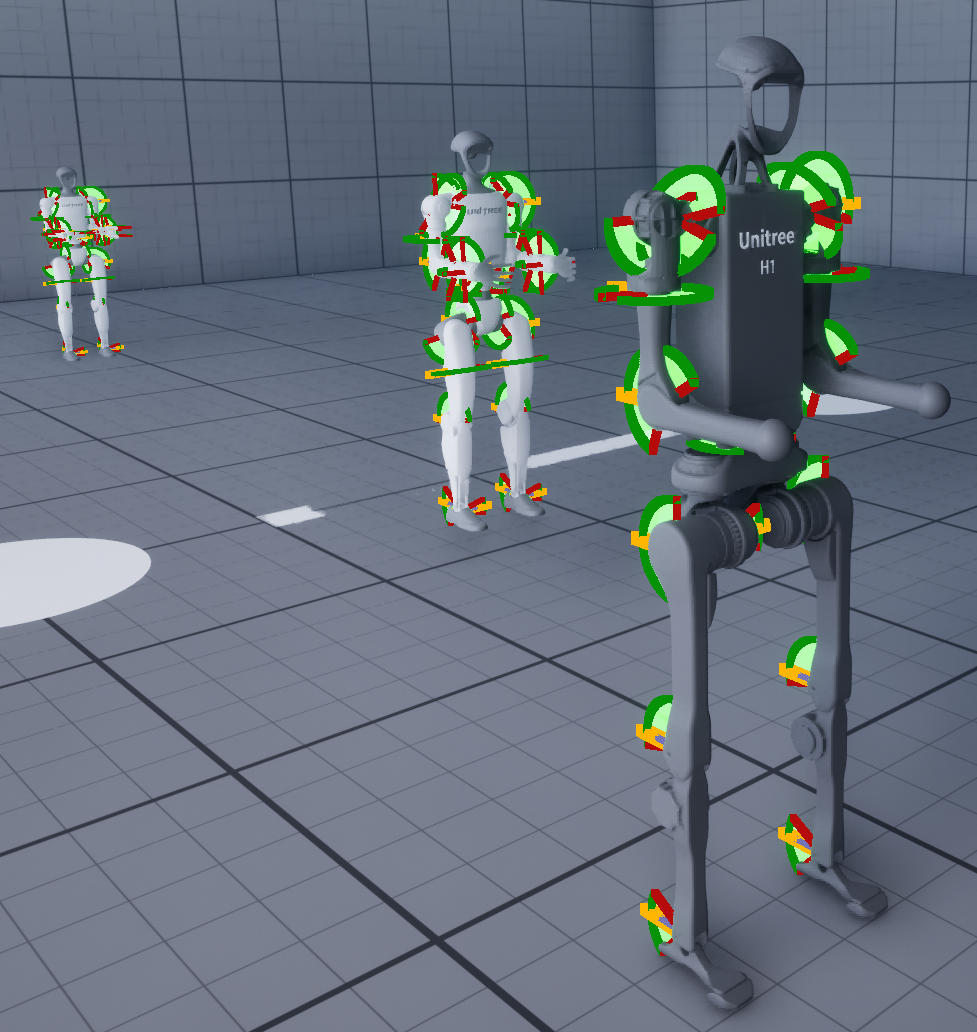
关节轴 + 极限弧 | 每个关节处均有彩色箭头,指示轴线方向和当前/极限角度。 |
5 |
快速转换碰撞线框图 | 与第 3 步相同,但适用于通过 UMjQuickConvertComponent 生成的道具。 |
6 |
循环体着色器叠加 | Off → Island → 实例分割 → 语义分割Semantic Segmentation → Off. 见下文。 |
7 |
肌腱/肌肉光滑管状渲染 | 肌腱路径上分布着网状管,其粗细和颜色由肌肉激活决定。见下图。 |
P |
暂停(Pause)/恢复物理线程 | |
R |
重置(Reset)仿真状态 | |
O |
切换轨道和关键帧相机 | |
F |
解雇所有 AMjImpulseLauncher 参与者 |
|
Shift+F1 |
弹出控制界面,但模拟继续 | |
Esc |
退出模拟 |
按1显示接触力箭头

按2切换显示/隐藏参与者
按3显示关节碰撞线框图
按4显示关节轴 + 极限弧
按5显示快速转换碰撞线框图
按 6 显示循环体着色器叠加
刚体着色器叠加(按键 6)
循环切换三种模式以及“关闭”模式。重绘所有铰链图元几何体、所有导入的网格几何体以及所有 UMjQuickConvertComponent 参与者的静态网格组件。首次应用时会缓存原始材质,并在模式返回“关闭”或 PIE 结束时恢复。
Island
根据约束岛(constraint island)(通过活动接触、关节限制、相等约束或摩擦损失相互连接的物体组)为每个物体着色。实现方式与 MuJoCo 的原生可视化工具 (engine_vis_visualize.c::addGeomGeoms) 完全一致:
- 通过
body_weldid→body_dofadr查找刚体的第一个自由度。 - 读取
mjData.dof_island[dof];如果 ≥ 0,则物体位于活动岛屿中,seed =island_dofadr[island]。 - 如果为
-1且启用了睡眠模式,则回退到tree_dofadr[dof_treeid[dof]](对于睡眠树,可以选择通过mj_sleepCycle传递,以便相互重叠的物体簇共享一种颜色)。 - Seed 通过 Halton 序列(基数 7/3/5)生成 HSV 颜色,与上游逐字节匹配。
没有自由度的刚体(世界物体worldbody、焊接到世界的物体)显示为中性灰色。
实例分割
每个刚体都会获得一个独特的 Halton 键控色调,该色调由关节类哈希值和刚体 ID 混合而成。这对于从 USceneCapture2D 或 UMjCamera 生成像素级精确的身体分割掩膜非常有用——因为叠加层绘制的是真实材质,所以它会在任何标准渲染通道中显示出来。
语义分割
属于同一铰链类(而非同一实例)的刚体共享一个色调。两个从 BP_Humanoid 实例化的蓝图都显示为同一种颜色;而 BP_KitchenTable 则显示为另一种颜色。对于快速转换道具,色调以参与者上的第一个静态网格资源为键控对象,因此共享同一网格的道具会被分组在一起。
睡眠模式调节
与模式无关。当 bModulateBySleep 开启(默认)时,睡眠状态下的物体会变暗并降低饱和度——V *= SleepValueScale(默认 0.35),S *= SleepSaturationScale(默认 0.9)。与上游 MuJoCo 的行为一致;默认值比上游略微激进,因此在虚幻引擎的 PBR 光照下效果清晰可见。
如果需要更强的睡眠效果(降低 SleepValueScale)或想要完全灰色的睡眠物体(将 SleepSaturationScale 降至 0),可以在“细节(Details)”面板中实时调整这两个比例。
渲染方式
每个绘制的网格体对应一个 UMaterialInstanceDynamic,父级为 /Engine/BasicShapes/BasicShapeMaterial。在 BeginPlay 事件中,可视化工具会探测该材质中名为 Color / BaseColor / Tint 的矢量参数,并使用第一个匹配项。没有插件自带的 .uasset 材质——可在不同的虚幻引擎版本之间兼容。
肌腱/肌肉渲染(键 7)
将每个<spatial> / <fixed>肌腱渲染为光滑的管状结构。对于肌肉致动器(dyntype mjDYN_MUSCLE,肌腱传输),管状结构的粗细和颜色均实时跟踪肌肉的激活状态。
视觉编码
| 信号 | 视觉 |
|---|---|
| 肌肉激活 (0–1) | 半径缩放范围从 0.5 倍 (松弛状态)到 2.0 倍(完全收缩状态)。颜色缩放范围从深蓝色到亮红色。 |
| 肌腱长度有限(无肌肉驱动) | 相同颜色/半径插值,由(ten_length − range_lo) / (range_hi − range_lo)驱动 |
| 中性肌腱(无肌肉,无限制) | 中等紫色,半径为标称值。 |
每个肌腱段的颜色区分是真实存在的:每个肌腱段都拥有自己的 UMaterialInstanceDynamic(通过 UPrimitiveComponent::CreateDynamicMaterialInstance 创建),因此同一只手臂上的两块肌肉的颜色会截然不同。
路径构建
每条肌腱的路径都取自 mjData.wrap_xpos / wrap_obj / ten_wrapadr / ten_wrapnum——这是 MuJoCo 的运动学后肌腱路径,包括肌腱与包裹几何体相切的切点。可视化工具:
- 按照 MuJoCo 自身的渲染器(
engine_vis_visualize.c::addSpatialTendonGeoms)的方式,遍历连续的包裹索引,并跳过滑轮端点(wrap_obj == -2)。 - 当两个连续的包裹点共享相同的几何体 ID 时(例如,圆柱体或球体包裹),会沿着围绕几何体世界位置的球面插值,使用
TendonArcSubdivisions(默认值为 6)中间点细分弦长——这样肌腱就会围绕几何体弯曲,而不是像 MuJoCo 自身的查看器那样直接跳跃。 - 对每个内部包裹点的切线方向进行平均,从而在各段之间生成 C1 连续连接。
渲染方式
一组 USplineMeshComponent 沿每个线段对 /Engine/BasicShapes/Cylinder.Cylinder 进行变形。圆柱体初始半径为 50 厘米,因此 TendonTubeRadius 通过 scale = radius_cm / 50 转换为引擎比例。组件采用惰性创建,逐帧重复使用,并在肌腱数量减少时隐藏(而非销毁)。
无物理效果、无碰撞、无阴影投射,且在视口中不可选择。
Tuning
| 属性 | 默认值 | 笔记 |
|---|---|---|
TendonTubeRadius |
0.25 厘米 | 标称管半径。肌肉激活程度最高可达 2 倍。 |
TendonArcSubdivisions |
6 | 每个几何体环绕弧的中间点数。降至 0 可实现 MuJoCo 的扁平弦线外观。 |
相机交互(已知问题)
由于快捷键 6 的叠加层会替换实际 UStaticMeshComponents 上的真实材质,因此任何渲染关卡的工具(例如 USceneCaptureComponent2D、UMjCamera 和截图工具)都会捕获叠加层,而不是底层场景。该叠加层本质上是一个视口调试工具。
对于需要始终输出纯 RGB、深度或分割图像(无论视口状态如何)的持续摄像机流,请改用每个摄像机的捕获模式——参见 相机捕获模式。这些模式与快捷键 6 无关:实例分割摄像机 InstanceSegmentation 即使在视口叠加层关闭时也会输出遮罩,而真实相机 Real 即使在视口显示孤岛时也会输出逼真的 RGB 图像。
如果您需要在通过 UMjCamera 捕获 RGB 的同时激活热键 6 叠加层,请在捕获窗口之前将叠加层关闭(按 6 直到关闭)。
实现参考
- 热键调度 — MjInputHandler.cpp
- 快照捕获(物理线程) — MjDebugVisualizer.cpp:
CaptureDebugData - 霍尔顿岛颜色辅助函数 — MjColor.cpp (与 MuJoCo 上游完全匹配,并由
URLab.Color.*自动化测试覆盖) - 上游参考 — MuJoCo 的
engine_vis_visualize.c