全身肌肉骨骼模型 MS-Human-700
MS-Human-700.xml 模型代表了人体全身肌肉骨骼系统,其特点包括:
- 90个身体节段
- 206个关节(为保证控制稳定性,数值限制为 85)
- 700个肌腱单元
- 解剖学上合理的参数
- MuJoCo 整合
该模型能够模拟全身动力学以及与各种设备的交互,使其适用于具身智能、机器人和生物力学领域的研究。
渲染效果:
| 前视角 | 环绕视角 |
|---|---|
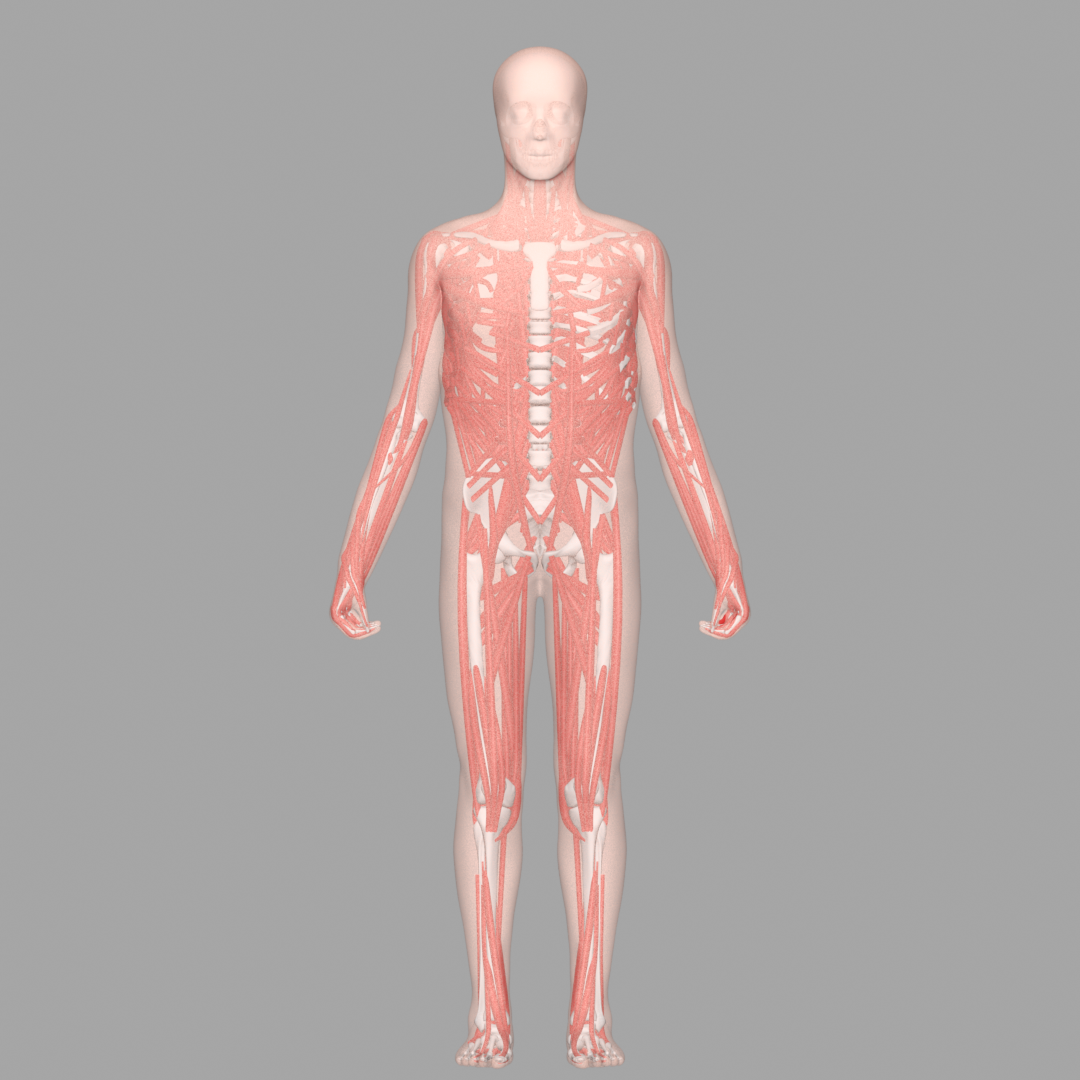 |
 |
腿运动模型
文件: MS-Human-700-Locomotion.xml
该模型着重研究下肢动力学,将腿部单独用于运动研究,同时简化了上肢和躯干。
- 身体节段: 80
- 关节: 36
- 肌肉: 100
单手操作模型
文件: MS-Human-700-Manipulation.xml
重点训练右臂和右手细节,专为操作任务而设计。
- 身体节段: 127
- 关节: 42
- 肌肉: 81
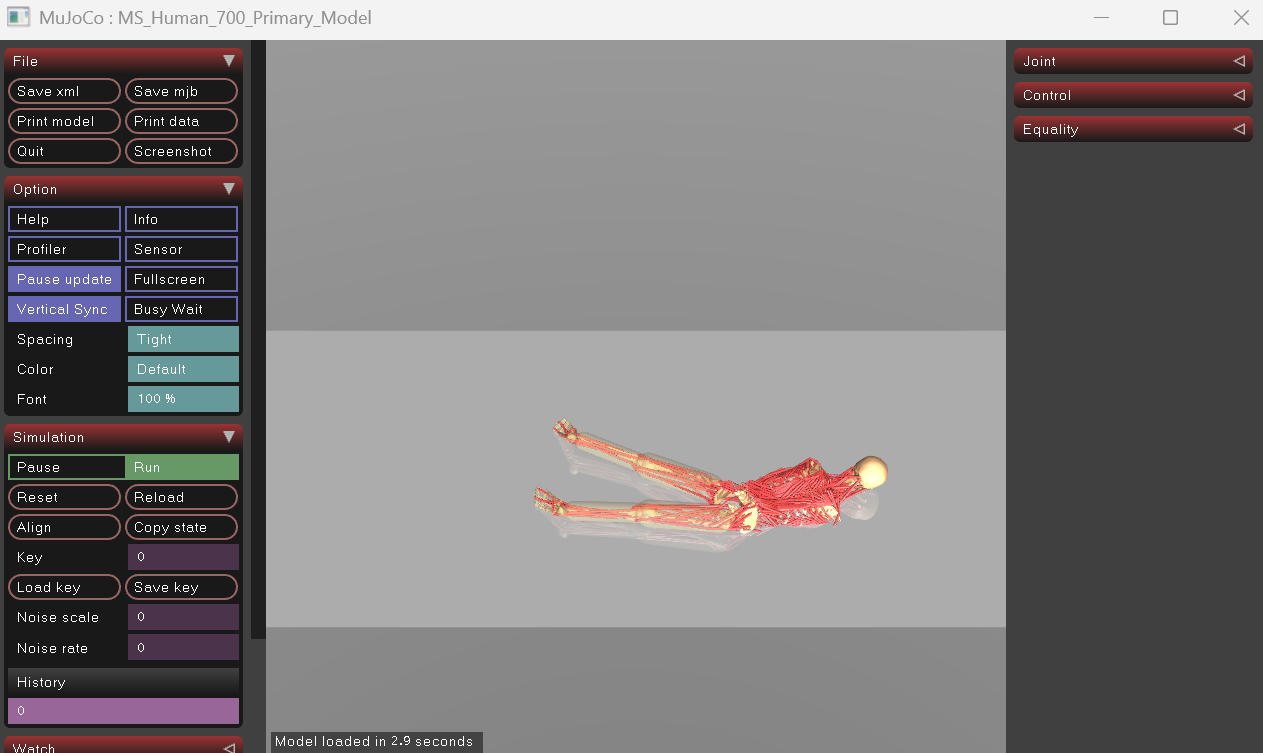
运行
1.下载并加载模型
# 克隆模型仓库
git clone https://github.com/LNSGroup/MS-Human-700.git
# 使用mujoco打卡模型
mujoco/bin/simulate.exe MS-Human-700/MS-Human-700.xml
DynSyn 控制结果:
| 控制全身的移动 | 控制腿的移动 | 抓取 |
|---|---|---|
 |
 |
 |
DynSyn
DynSyn:用于过驱动具身系统高效学习与控制的动态协同表示1。
1.安装
git clone https://github.com/OpenHUTB/DynSyn.git
cd DynSyn
conda create -n hutb_3.9 python=3.9
conda activate hutb_3.9
pip install poetry
poetry install
2.运行
# 生成 DynSyn 到 log 文件夹下
python dynsyn/dynsyn.py -f configs/DynSynGen/dynsyn.yaml -e myoLegWalk
# 训练
python dynsyn/sb3_runner/runner.py -f configs/DynSyn/myowalk.json
"load_kwargs": {
"dynsyn_weight_amp": 0.1
}
Qflex 控制
Qflex 一种可扩展且高效的在线强化学习(RL)方法2,用于高维动态系统的连续控制。此类系统通常面临诸多挑战,严重阻碍高效学习:
- 高维性:状态-动作空间的大小随维度迅速增长,导致显著的“维度灾难”效应;
- 过度驱动:在执行器数量远大于自由度的情况下,多个动作序列可能产生无法区分的运动学特征,但内部力和成本却可能不同。
git clone --recurse-submodules https://github.com/LNSGroup/Qflex.git
cd Qflex
conda activate hutb_3.12
#
python scripts/train.py --alg qflex --env MS700Locomotion-v1 --seed 100 --total_step 50000000 --num_vec_envs 224 --hidden_dim 1024 --diffusion_hidden_dim 1024 --record_video
# 减少 num_vec_envs 用于调试:
python scripts/train.py --alg qflex --env MS700Locomotion-v1 --seed 100 --total_step 50000000 --num_vec_envs 4 --hidden_dim 1024 --diffusion_hidden_dim 1024 --record_video
报错:No module named 'relax.spinlock'
Windows 下安装relax-0.1.0:
cd Qflex
# windows下需要注释掉 https://github.com/LNSGroup/Qflex/blob/a028cfa76525a62bfb90d76c6f1535f697121383/src/futex.c#L3
pip install -e .
QFlex 控制结果:
| 跑步 | 跳舞 |
|---|---|
 |
 |
高保真运动跟踪结果:
利用 MuJoCo Warp 进行大规模并行 GPU 仿真,可以快速高效地训练控制策略,从而在各种动态轨迹上实现高精度运动跟踪。
以下演示展示了 MS-Human 模型的这些跟踪功能:
- 重叠: 模型和参考轨迹直接渲染,以直观地展示跟踪精度。
- 分离: 模型和参考轨迹以一定的偏移量渲染,以突出运动细节。
| 跑步:重叠 | 跑步:分离 |
|---|---|
 |
 |
| 走路:重叠 | 走路:分离 |
 |
 |
-
He, K., Zuo, C., Ma, C. & Sui, Y. DynSyn: Dynamical synergistic representation for efficient learning and control in overactuated embodied systems. arXiv preprint arXiv:2407.11472 (2024). ↩
-
Wei, Y., Zuo, C. & Sui, Y. Scalable exploration for high-dimensional continuous control via value-guided flow. in The fourteenth international conference on learning representations (2026). ↩